
「小学生ロボコン自律型キット A.I.ロボット」の作り方
用意するもの
・プラスドライバー(大、小)
・ニッパー
・ラジオぺンチ
・ハサミ
・マイナスドライバー
・じょうぎ
・ネームペン

モーター
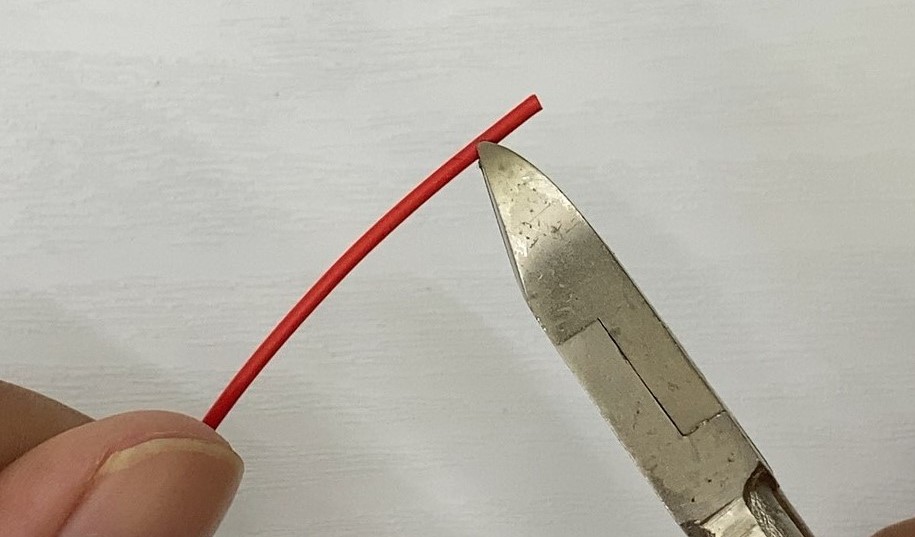

1. ニッパーと爪を使って赤ケーブル(2本)、
黒ケーブル(2本)の両端を5ミリずつ皮を
はぎます。
※導線ごと切らないように注意
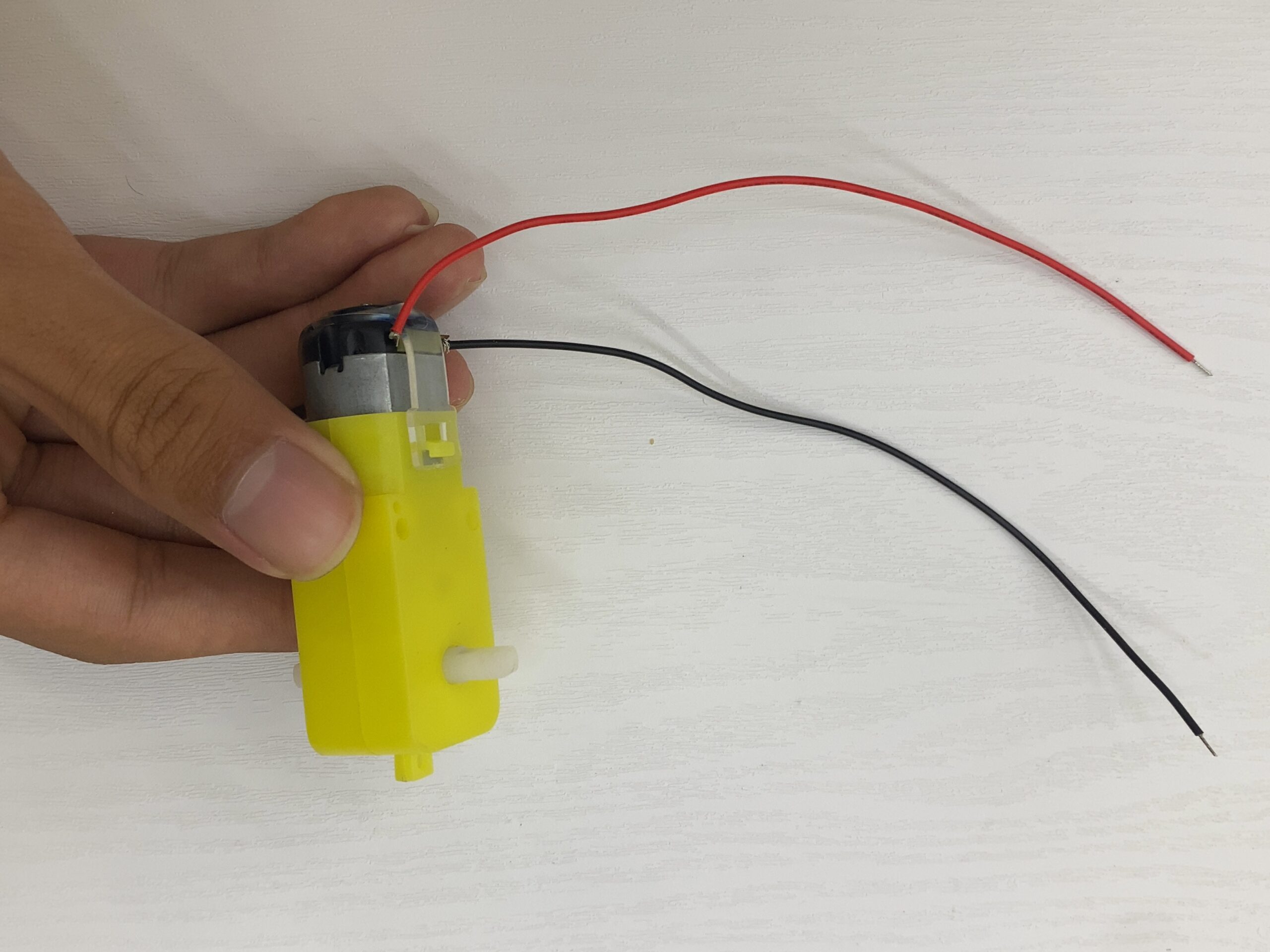
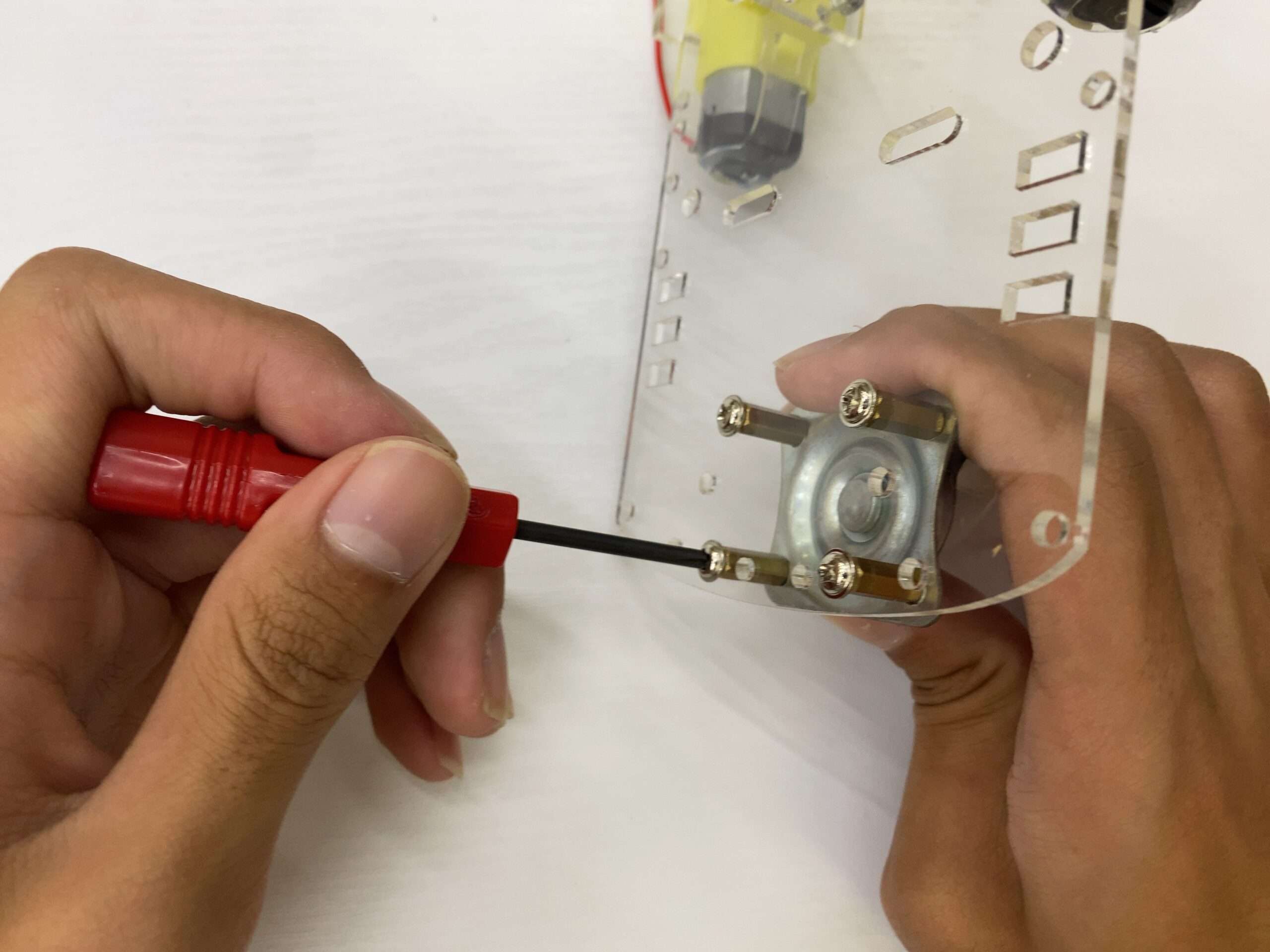
2. 写真のようにモーターとつなぎます。 ×2
キャスター

キャスターと金属スペーサーを5ミリの
フランジ付きねじで4か所を固定します。
シャーシ
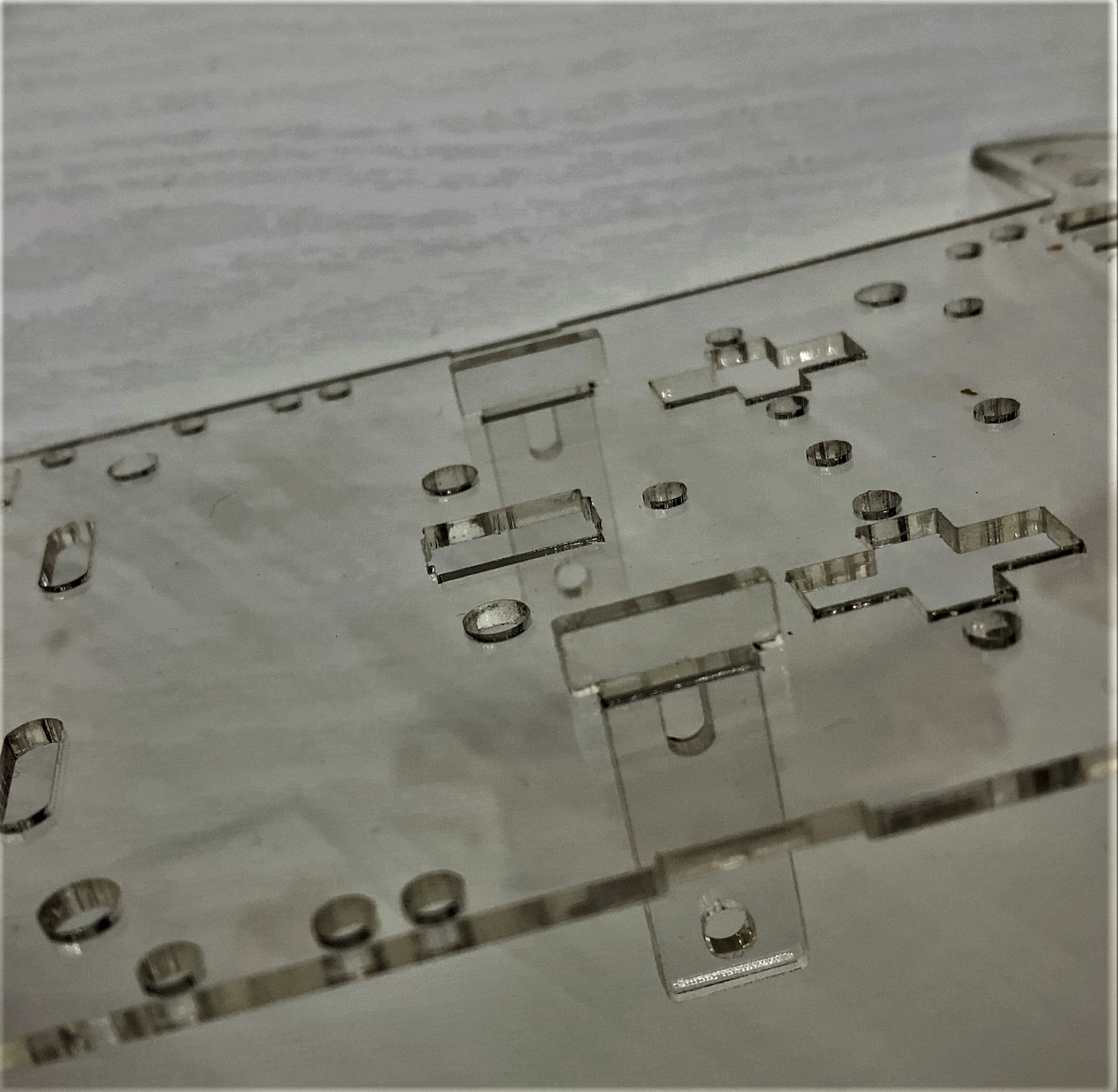

1. シールをはがしたシャーシとモーターステイ
(2個)を写真のように固定します。
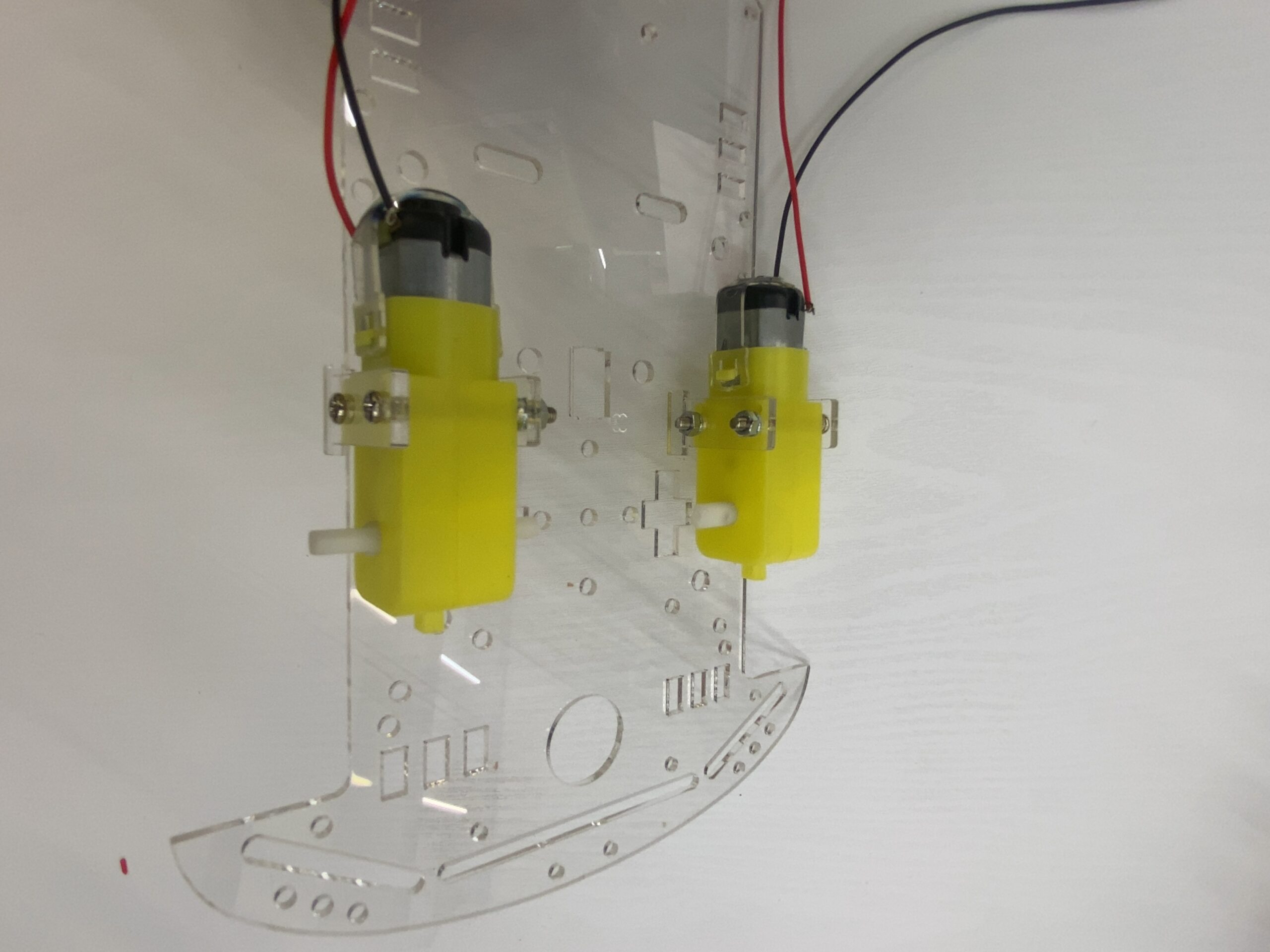
2. 写真のように30ミリの鍋ねじを使って、
外側から
モーターステイ
モーター
モーターステイ
ワッシャー
スプリングワッシャー
ナット
の順にねじを上下2か所ずつ固定します
このとき、ケーブルが外側を向くように
してください。
3. シャーシの後ろ部分の4か所の穴と
スペーサーが対応するようにねじ
で固定します。
電池ボックス
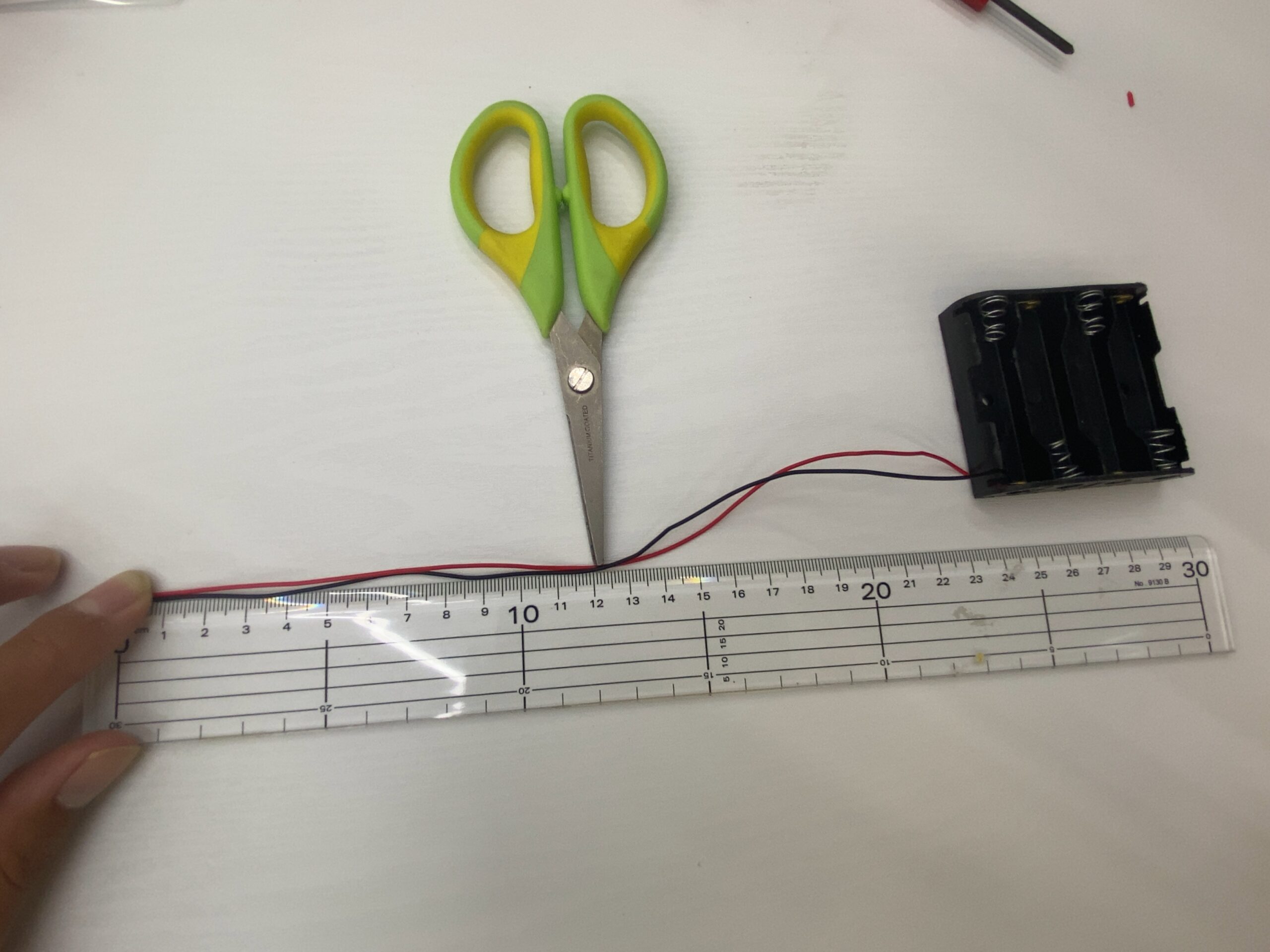
1. 電池ボックスのケーブルの先端から
12センチのところでカットします。
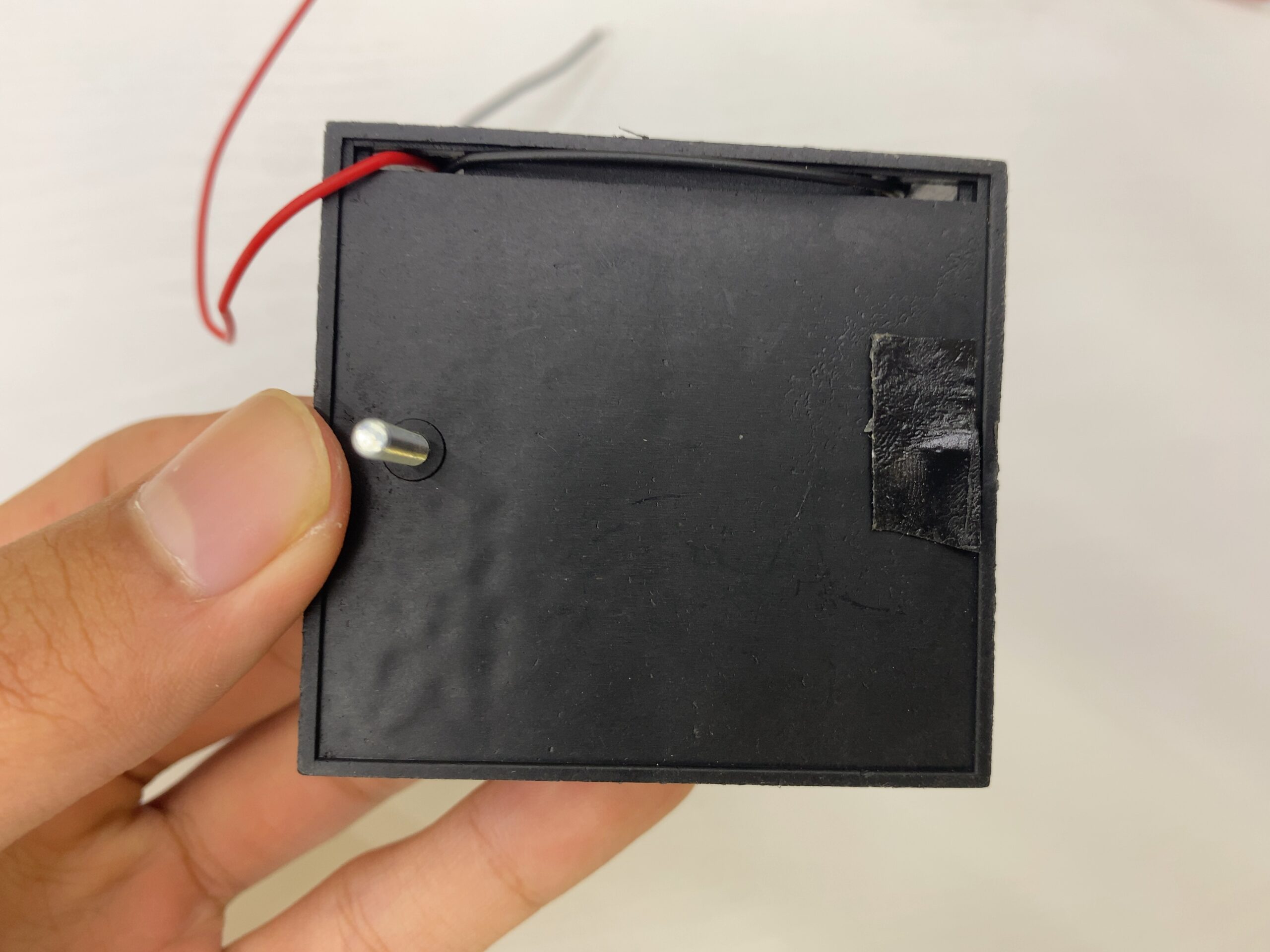
2. 写真のように片方の穴に15ミリの皿ねじ、
もう片方の穴の位置に両面テープ(小)
を貼ります。
3. 2のねじは、下から
電池ボックス
シャーシ
ワッシャー
スプリングワッシャー
ナット
の順に固定します。
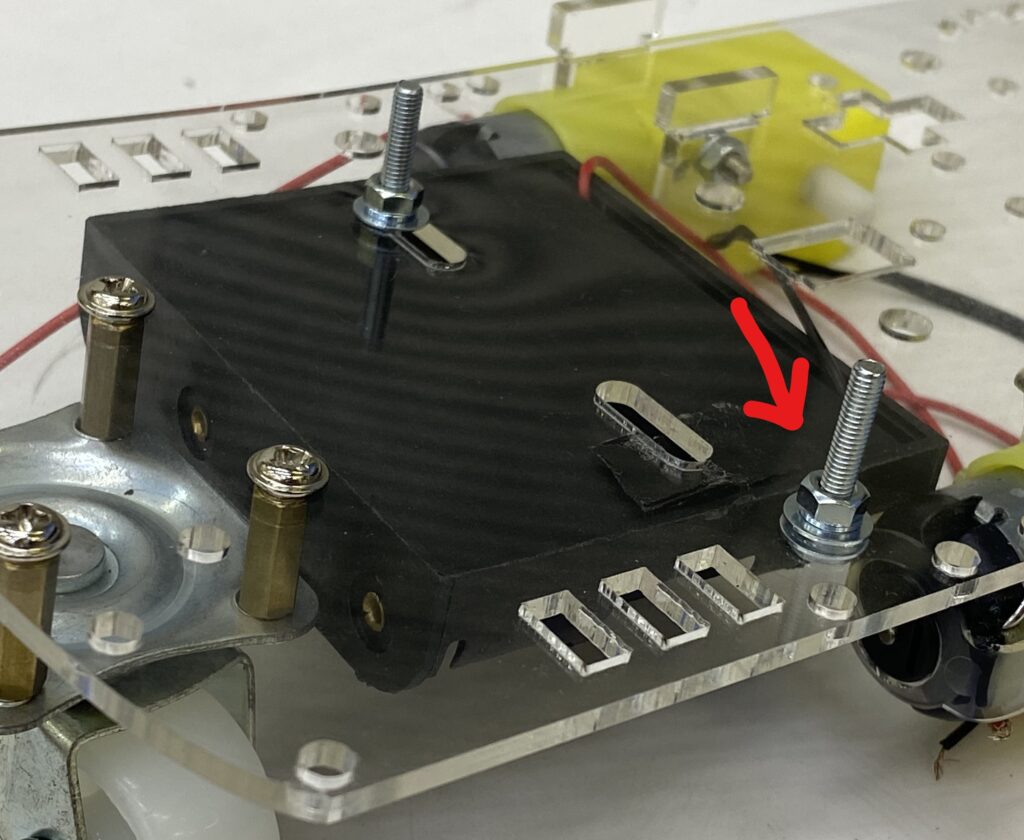
また、赤矢印のところには15ミリの皿ねじを
写真の位置に下から
ワッシャー
シャーシ
ワッシャー
スプリングワッシャー
ナット
の順に固定します。
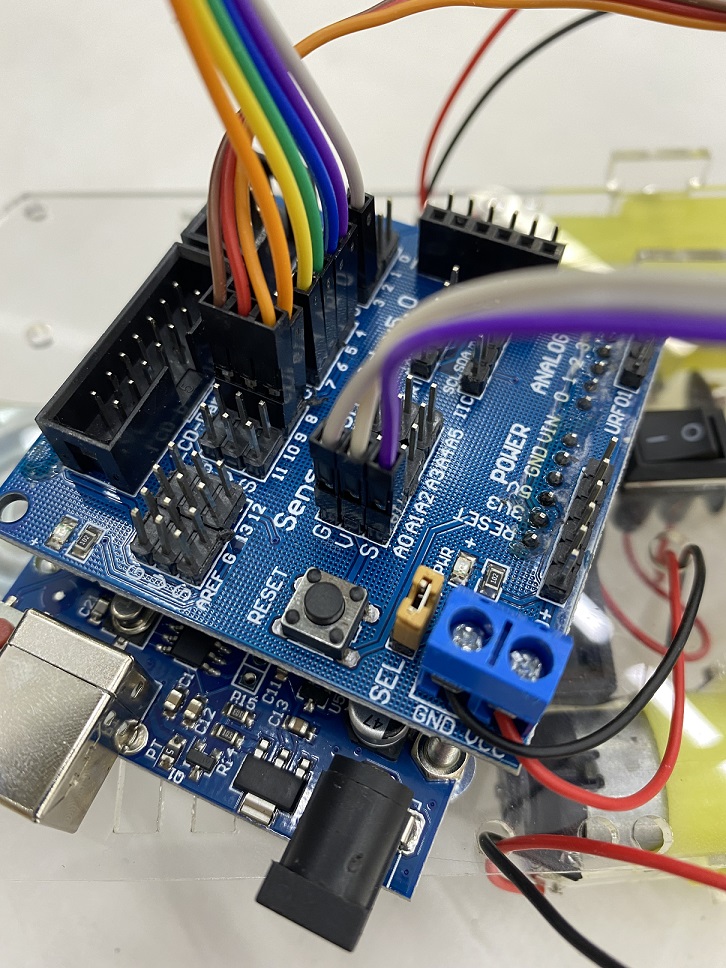
Arduino UNOの取り付け
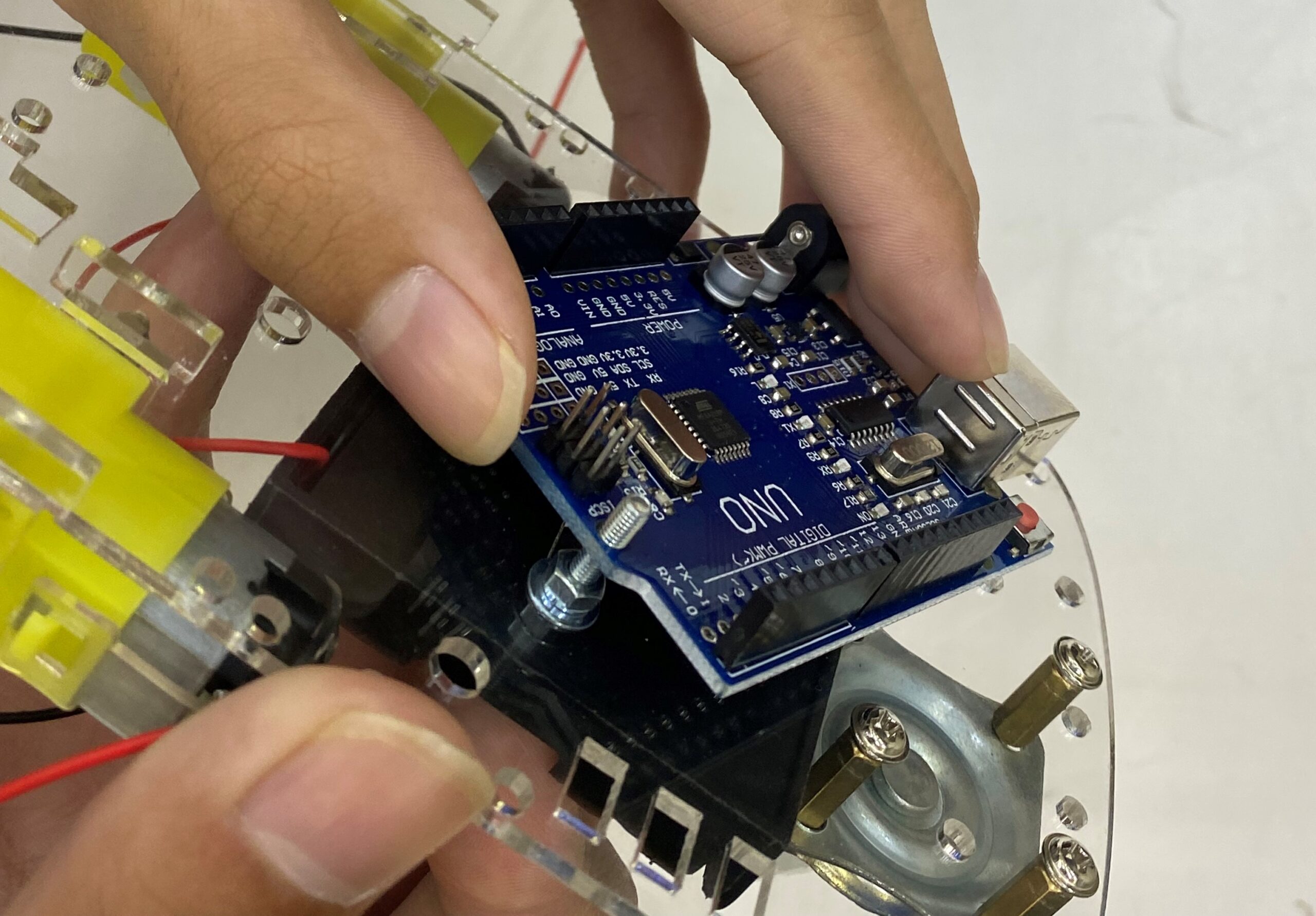
1. Arduino UNOを電池ボックスの3番で固定したねじに
差し込みます。
※USBポートが車体を後ろから見て右斜め
後ろを向くようにそれぞれのねじにナット
をはめて固定します。
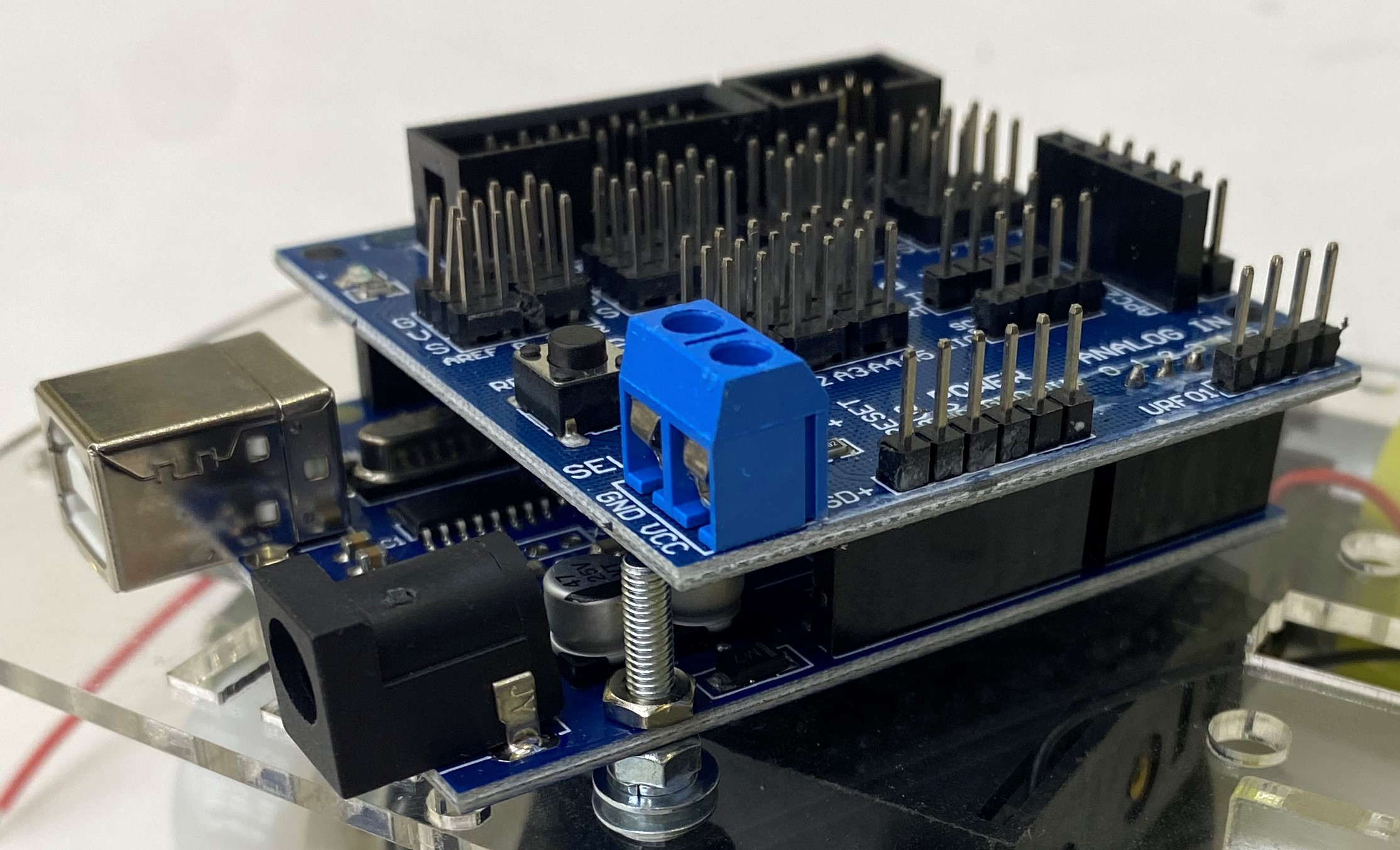
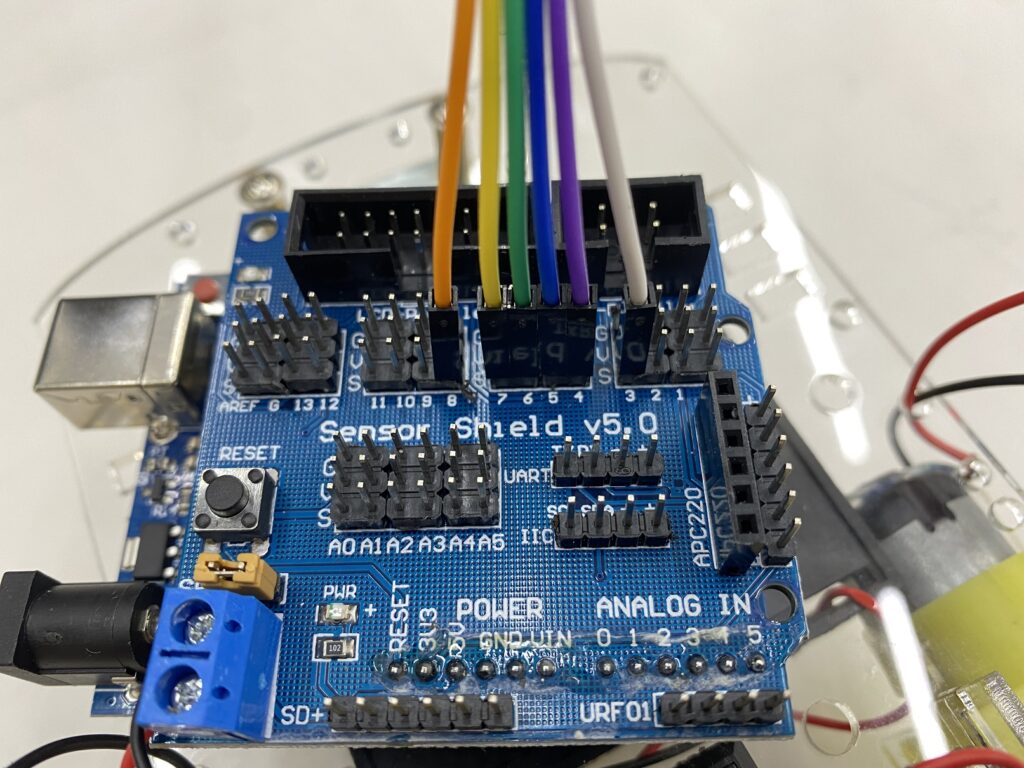
2. センサーシールドをUNOに差し込みます。
※SCL、SDAポートにはセンサーシールド
のピンは入りません。
※ピンが完全に入るように強く押し込んで
ください。
モータードライバーの取り付け
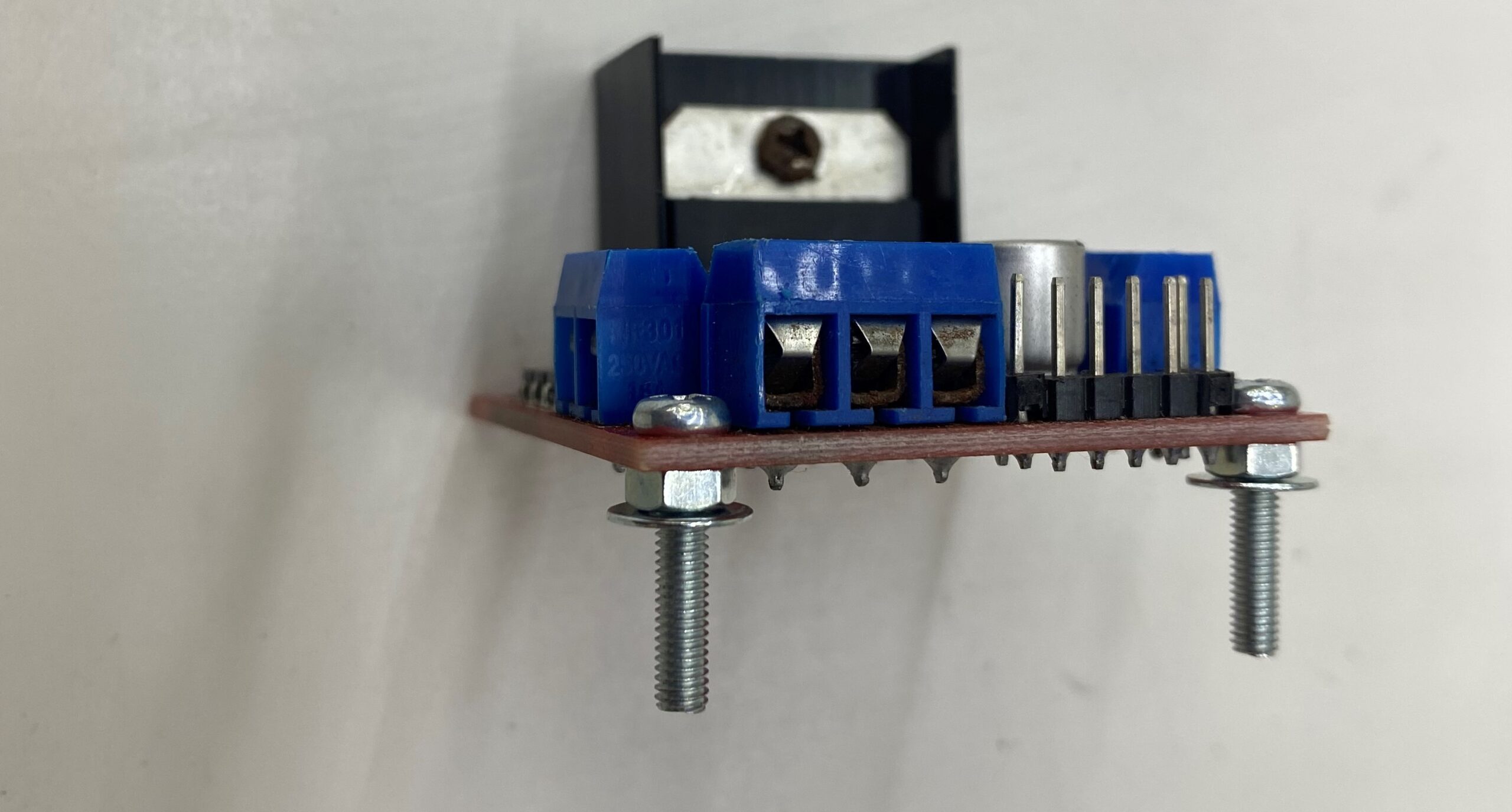
1. 端子台側の二つの穴に15ミリの鍋ねじをさし、
ナット、ワッシャーをはめます。
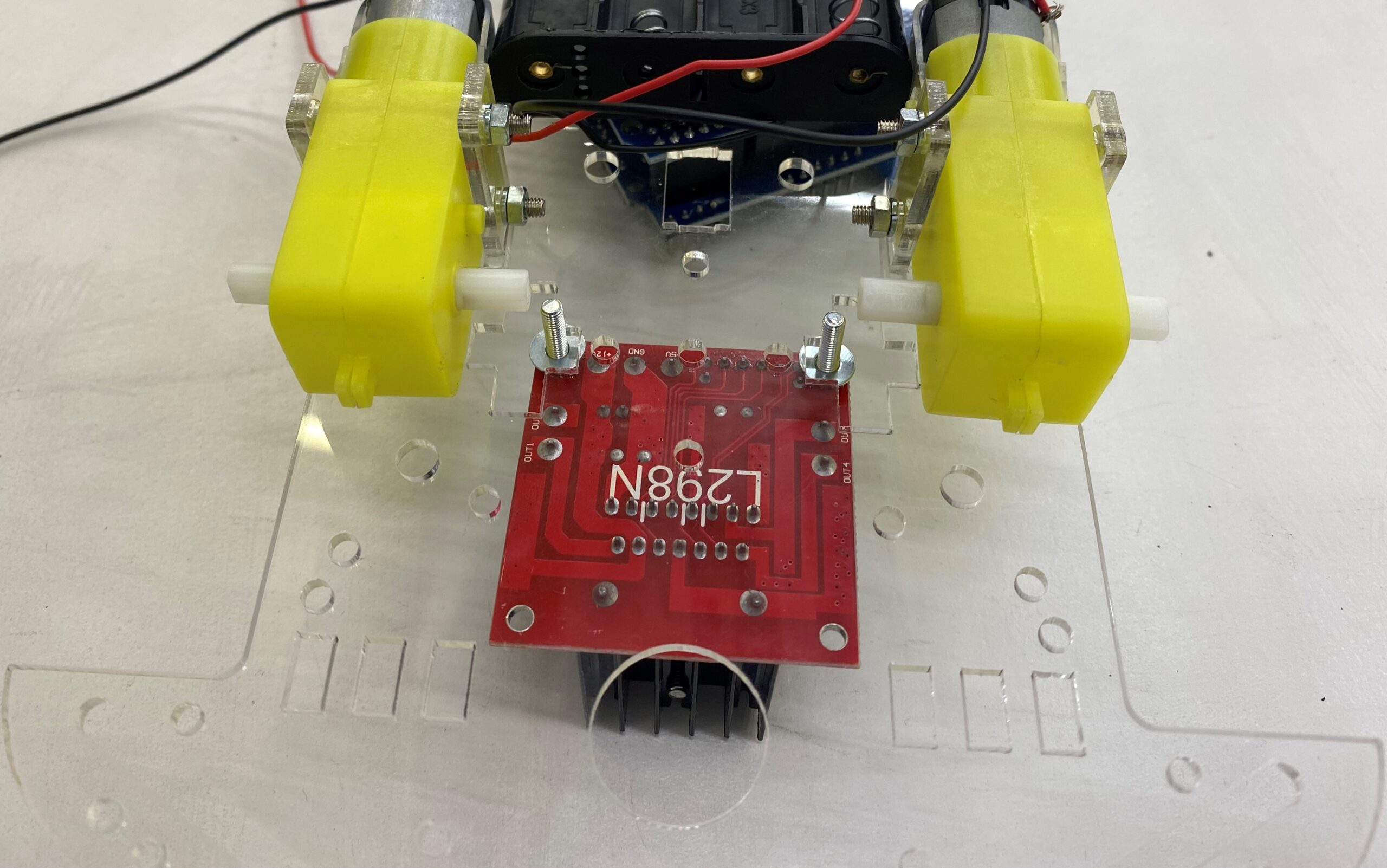
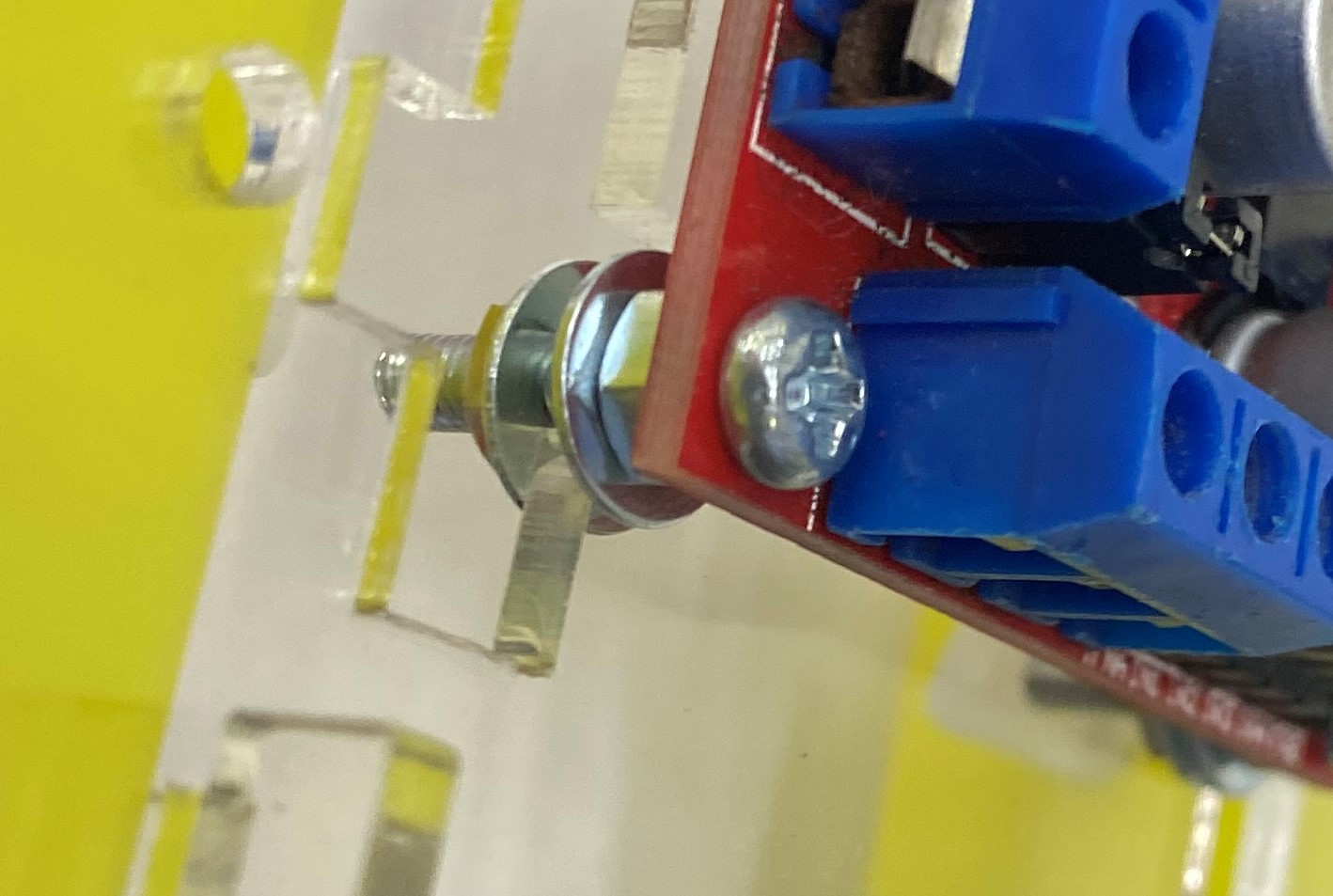
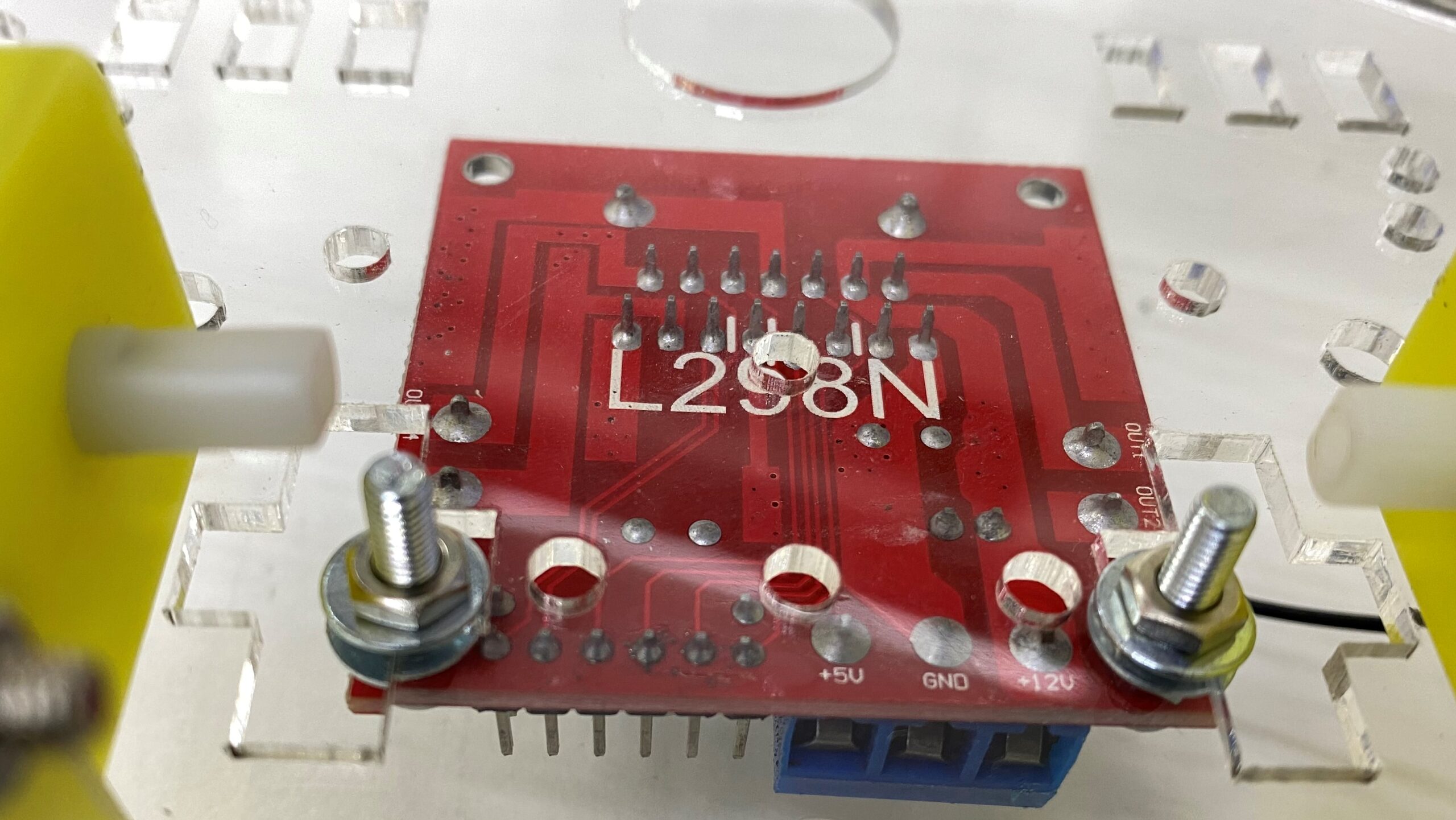
2. 1で取り付けたねじを1番の工程も含めてを
上から
モータードライバー
ナット
ワッシャー
シャーシ
ワッシャー
ナット
の順に固定します
※ワッシャー二つでシャーシを挟む形
になります。
スイッチの取り付け
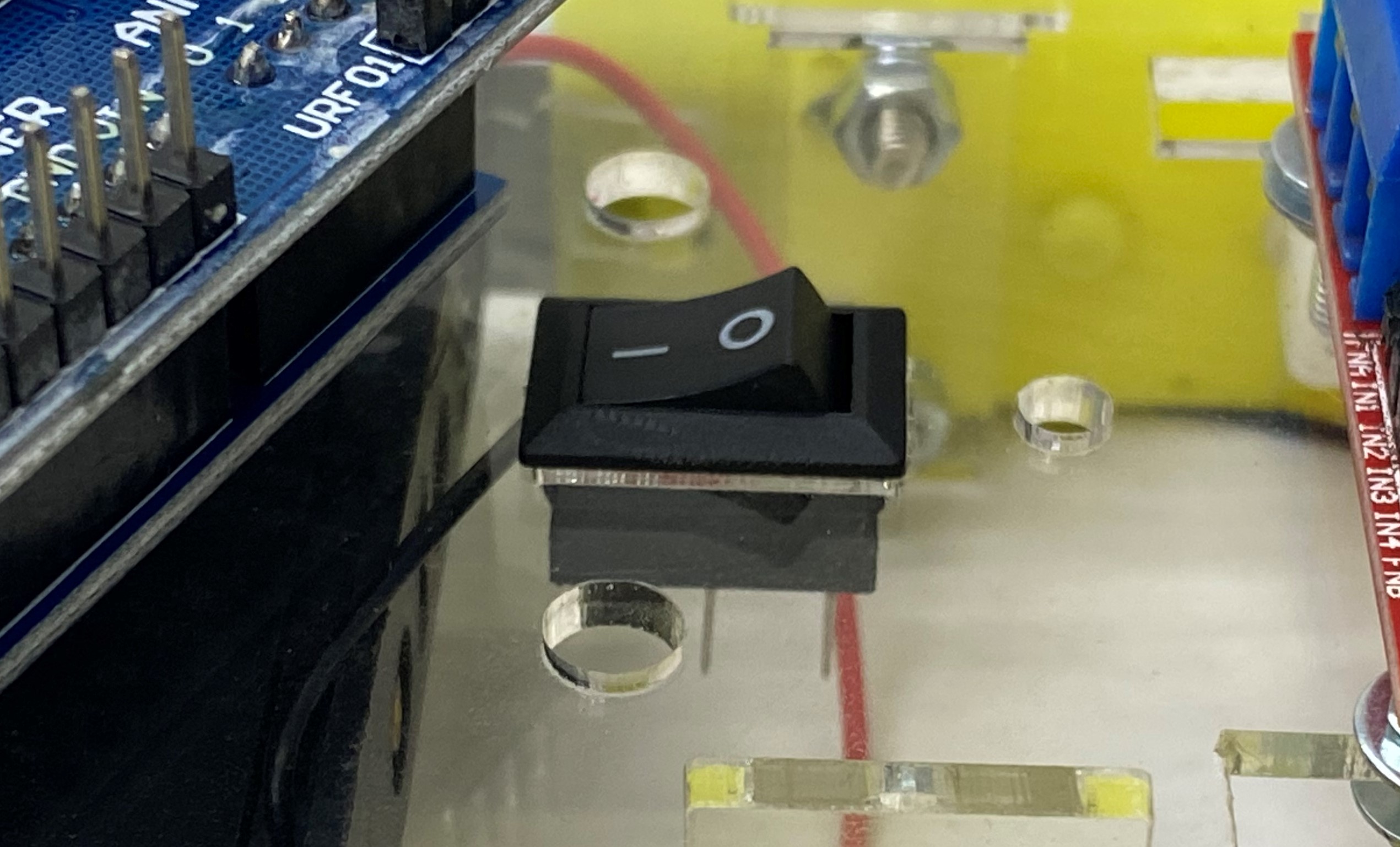
スイッチをシャーシ中央の穴にはめ込みます。
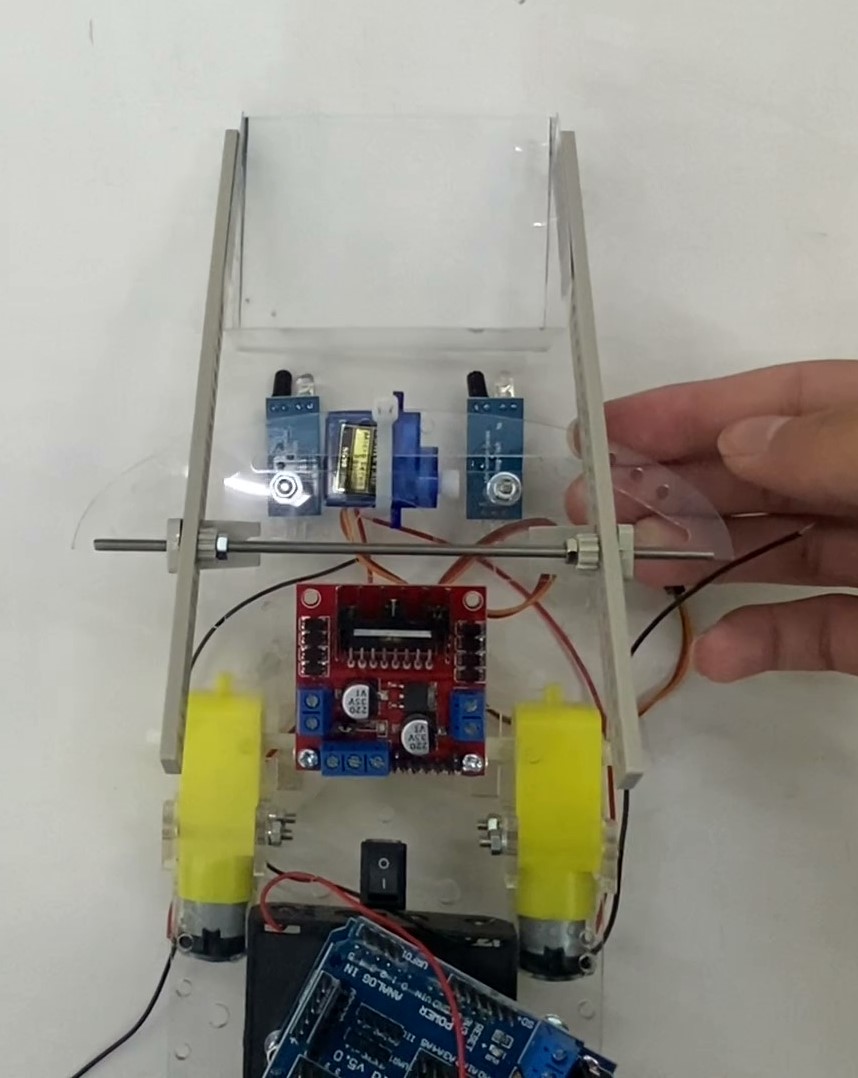
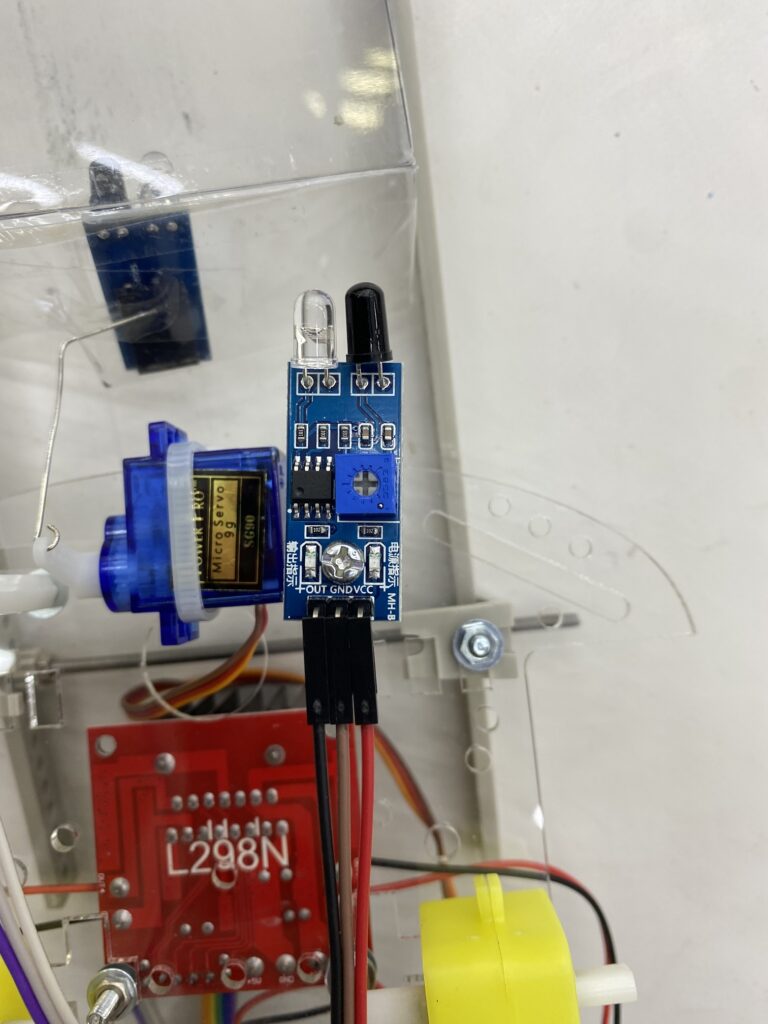
サーボモーターの取り付け
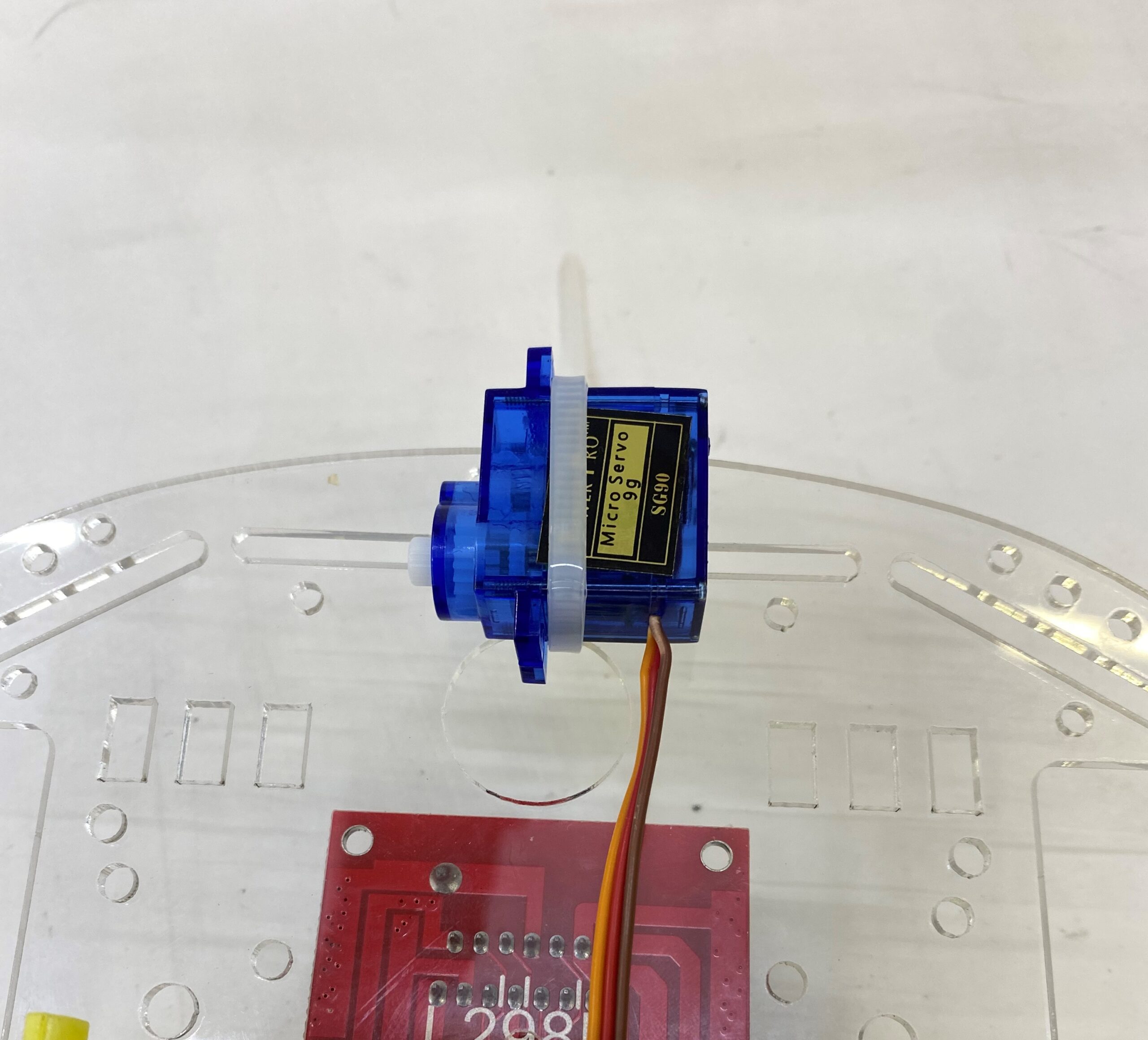
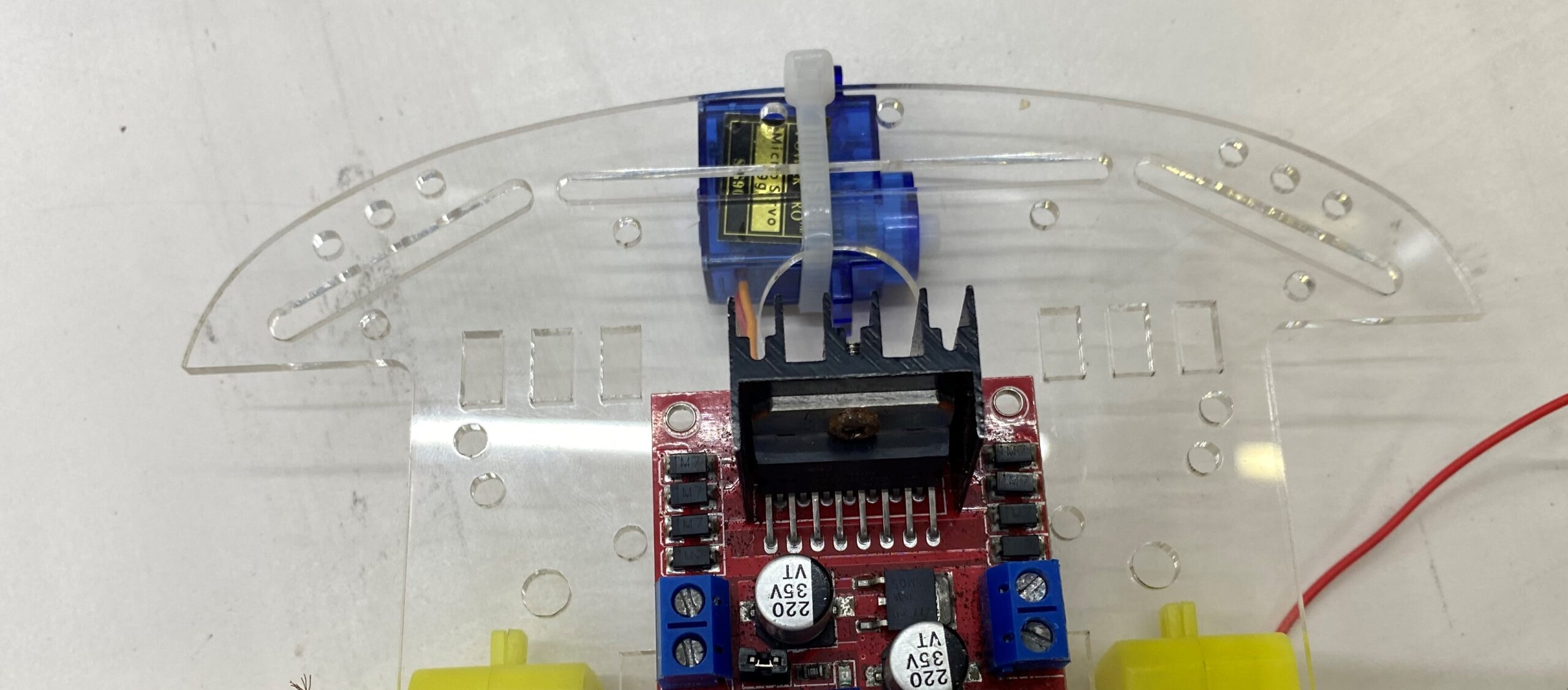
1. シャーシ下側にサーボモータが右を向くように
結束バンドを使って固定します。
残った結束バンドの部分はニッパーを使って
切り取ります。

2. サーボモーターにアームを下向きに
取り付けます。
ラインセンサーの取り付け

1. ラインセンサーに10ミリの鍋ねじとねじ付き
スペーサーを左の写真のように取り付けます。
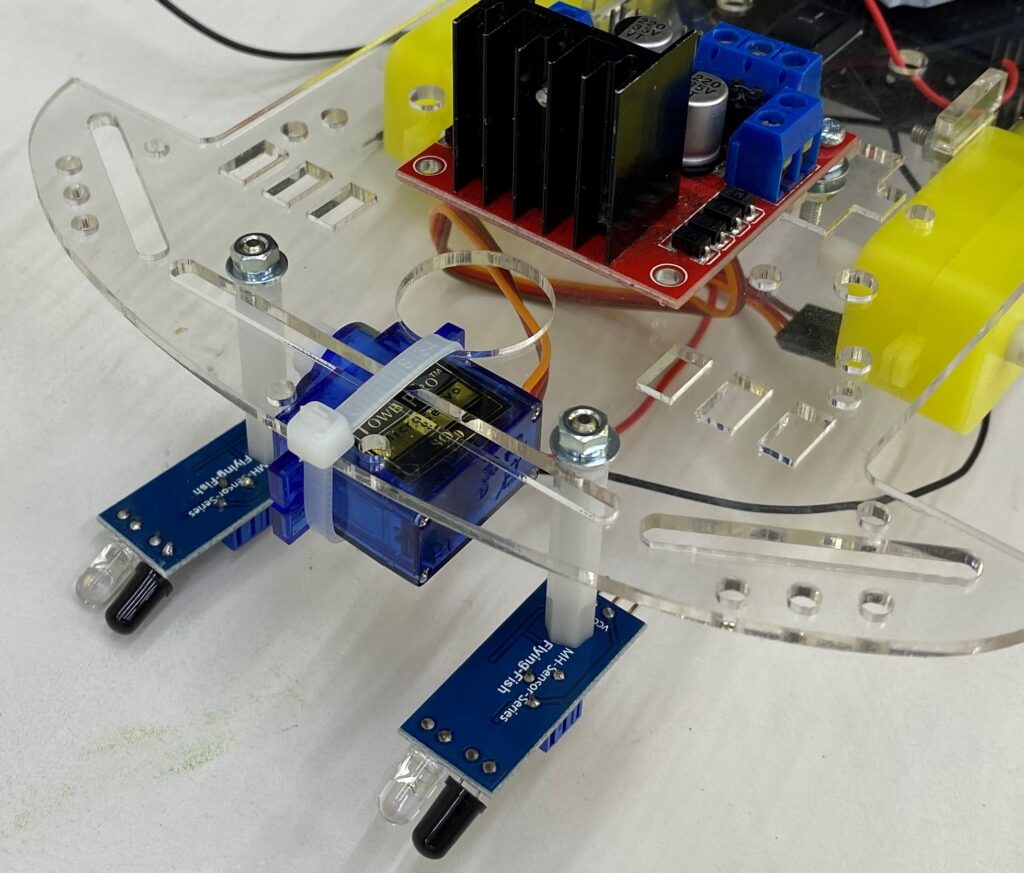
2. ねじ付きスペーサーをシャーシの前方の穴に
下から差し込みます。
差し込んだ後、ねじの部分にワッシャー、
スプリングワッシャー、ナットを入れて
固定します。
アーム
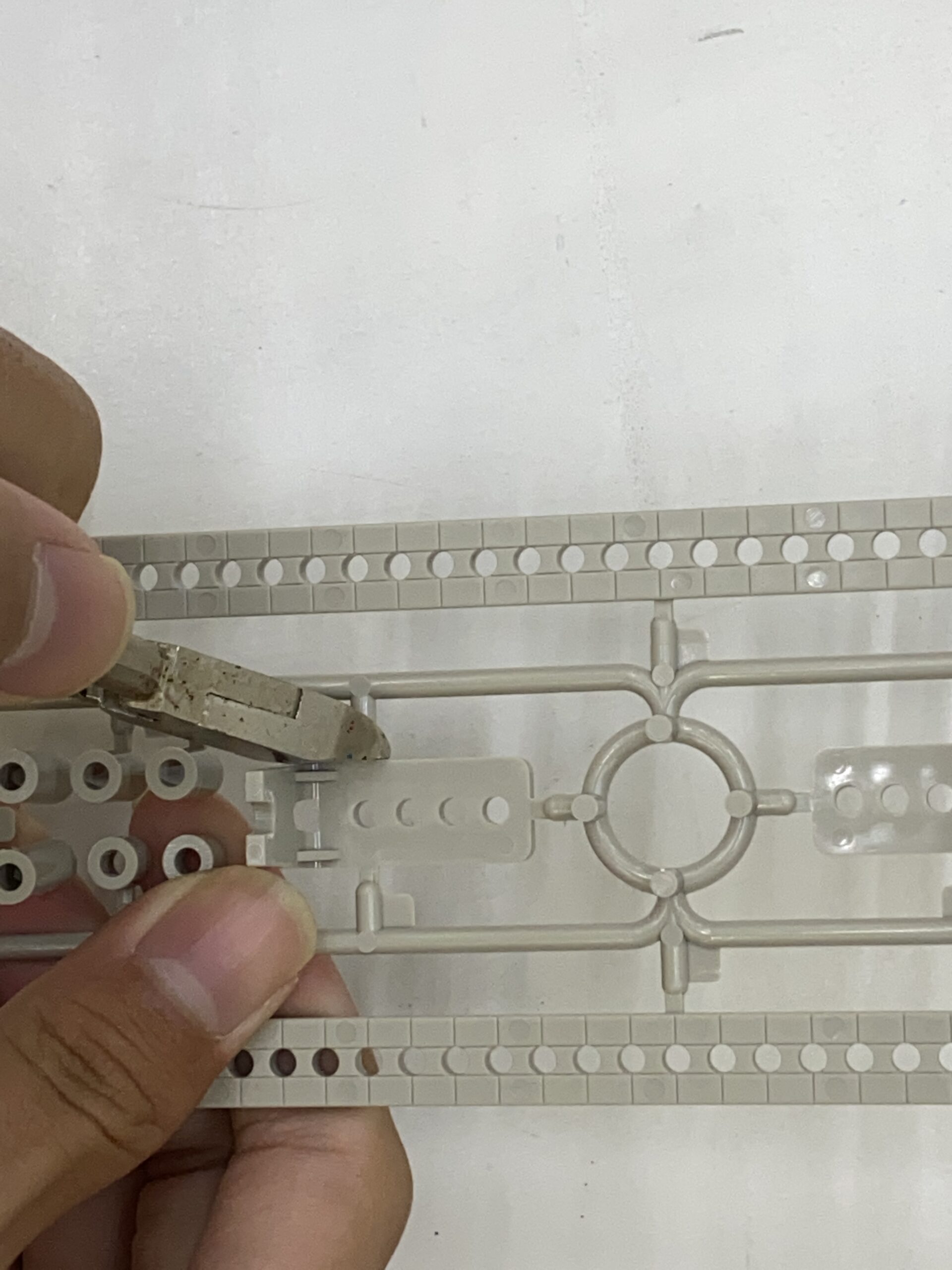
1. ユニバーサルアームセットに入っている
L型アームを2個切り取ります。
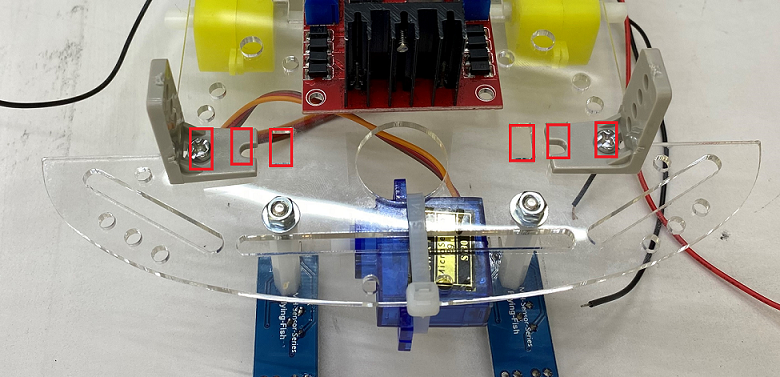
2. シャーシの先頭側、赤い四角がある一番外側の
左右それぞれの四角に写真の向きでL型アーム
を10ミリの鍋ねじを使って上から
L型アーム
シャーシ
ワッシャー
スプリングワッシャー
ナット
の順に固定します。
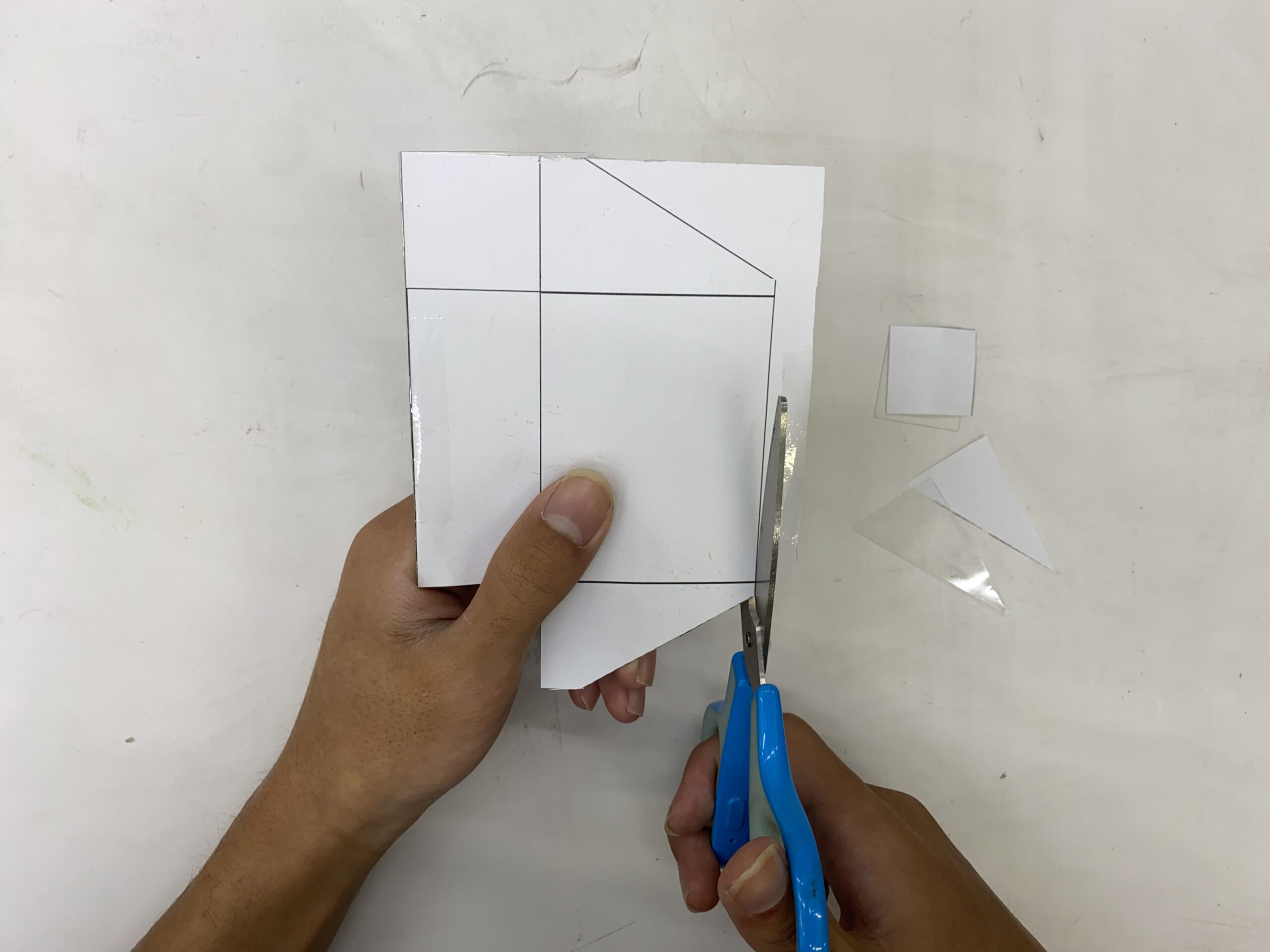
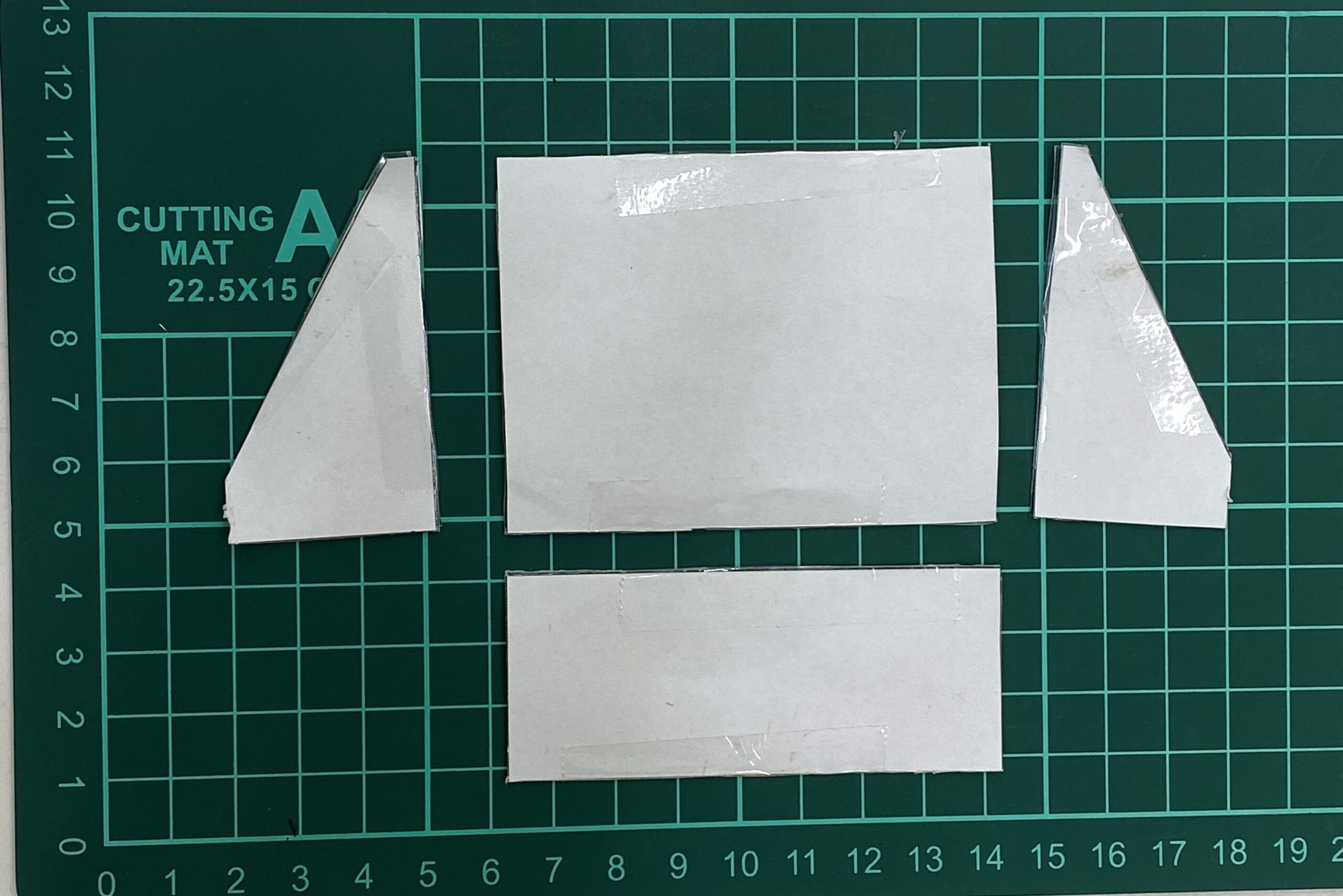
3. プラスチックの板を紙に印刷された線に沿って
切り取ります。
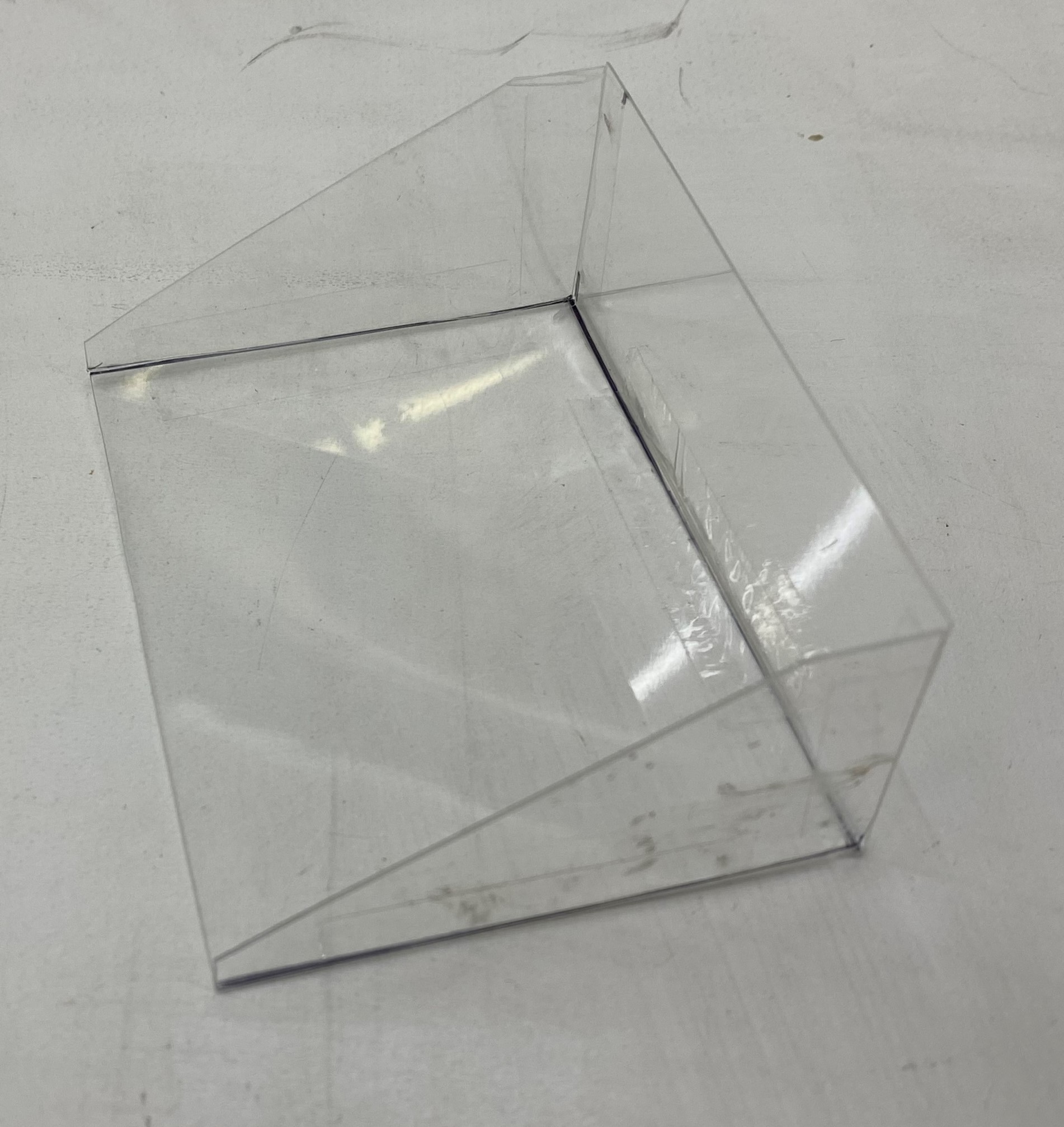
4. 切り取ったものを写真のように組み立てます。
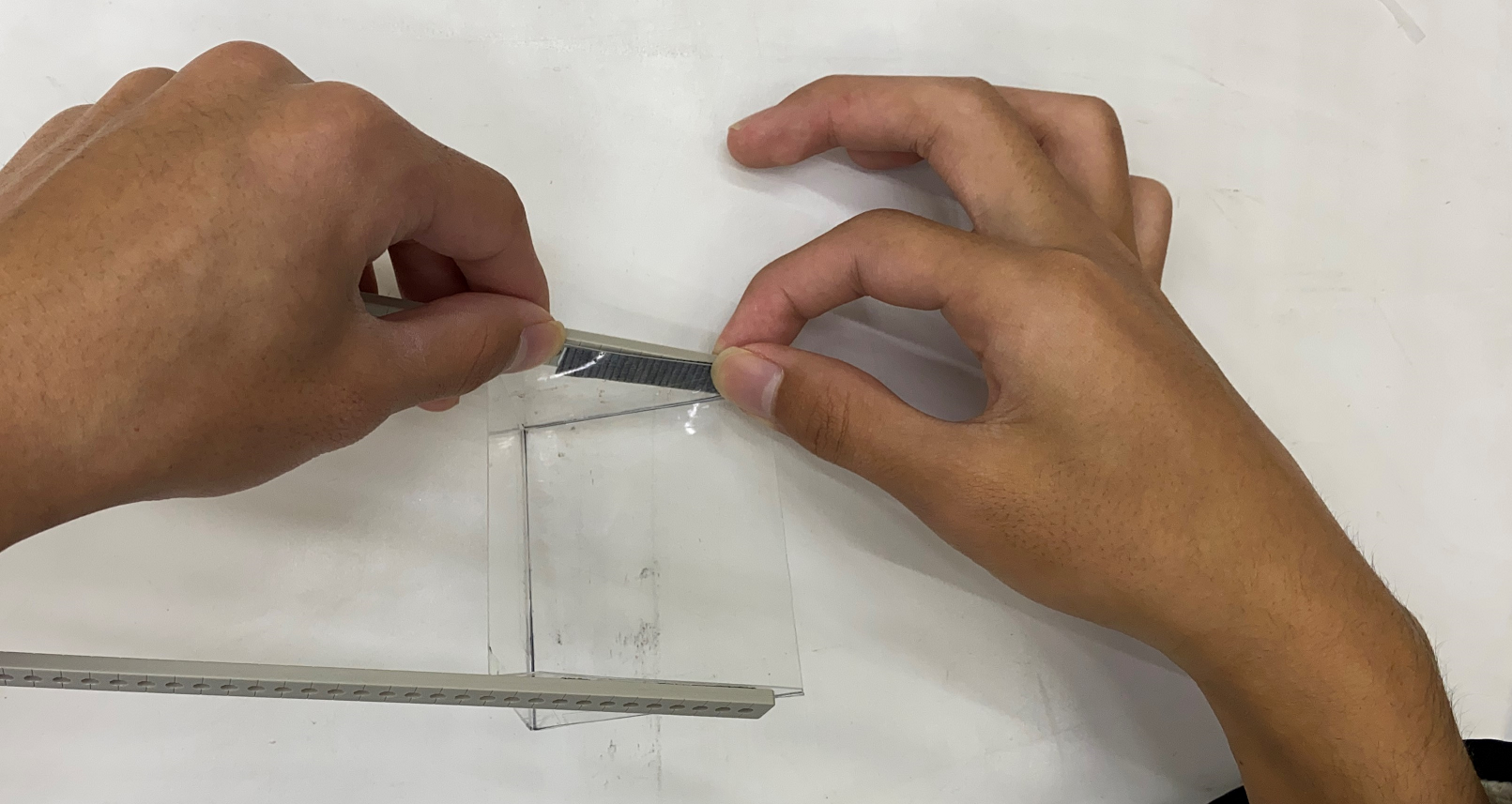
5. 作ったホールドの側面に両面テープ貼り
ユニバーサルアームセットに入っている
ユニバーサルアームを写真のように
貼りつけます。

6. 10マス目の位置に軸を通しアームの内側から
ナット
樹脂製ナット
アーム
の順に通します。
なお、次の過程で軸を穴に通しやすくする
ため、ナットと樹脂製ナットは中央に
よせておくと、通しやすくなります。
7. L型アームの一番高い穴に軸を通します。
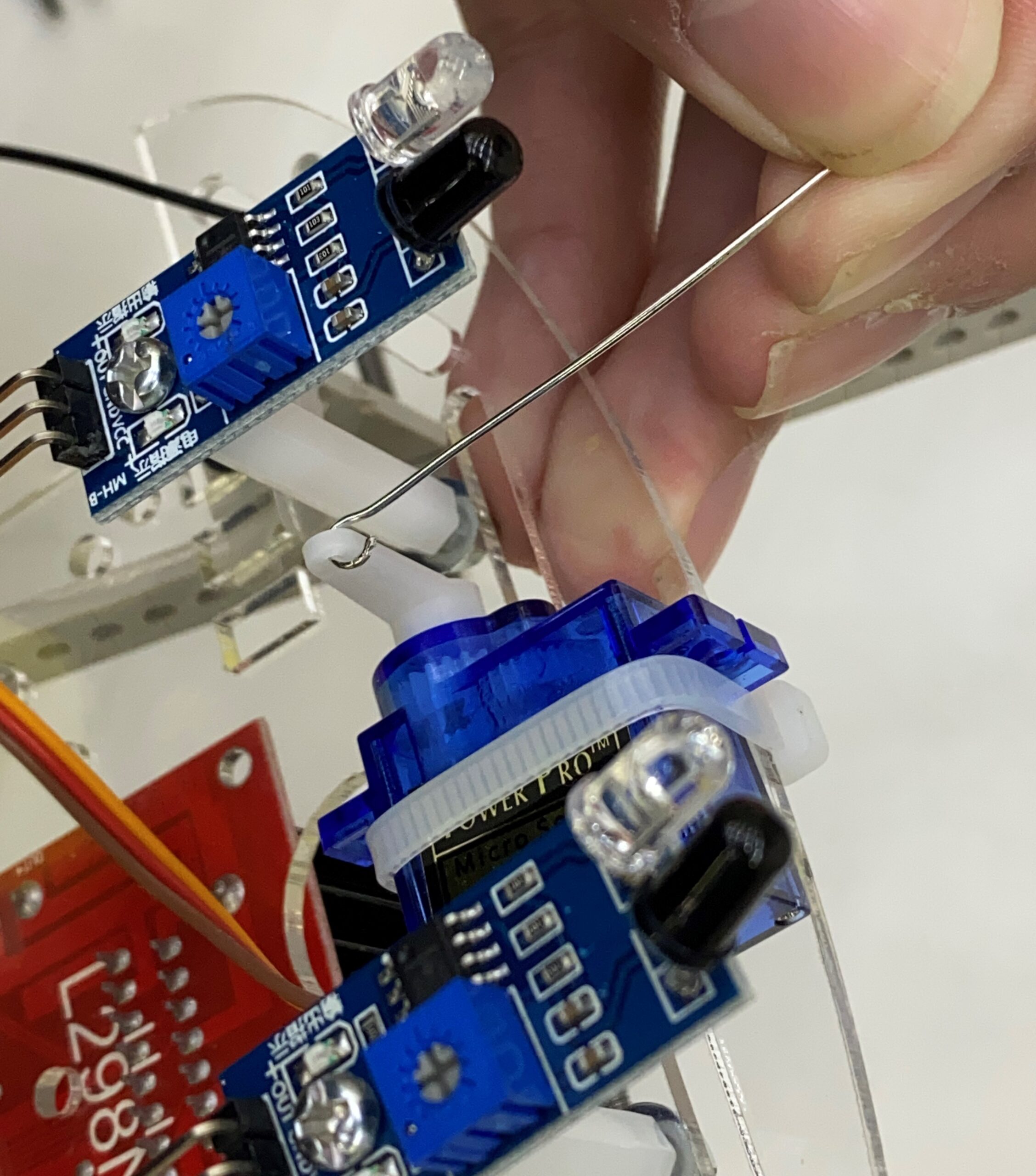
8. サーボモーターのアームにピンロッド
をつけます。
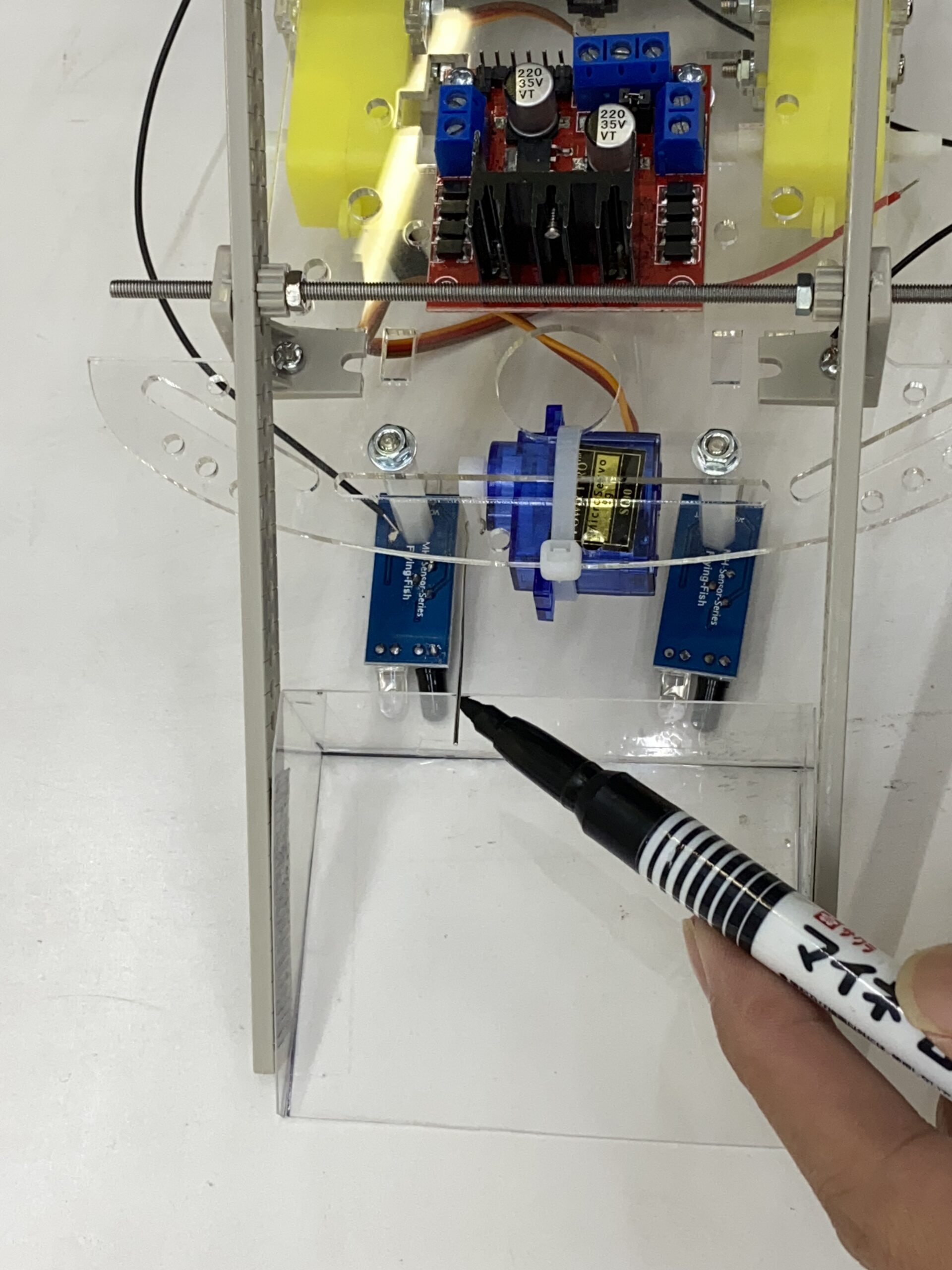
9. ネームペンなどを使ってピンロッドとホールド
が重なる位置に印をつけます。
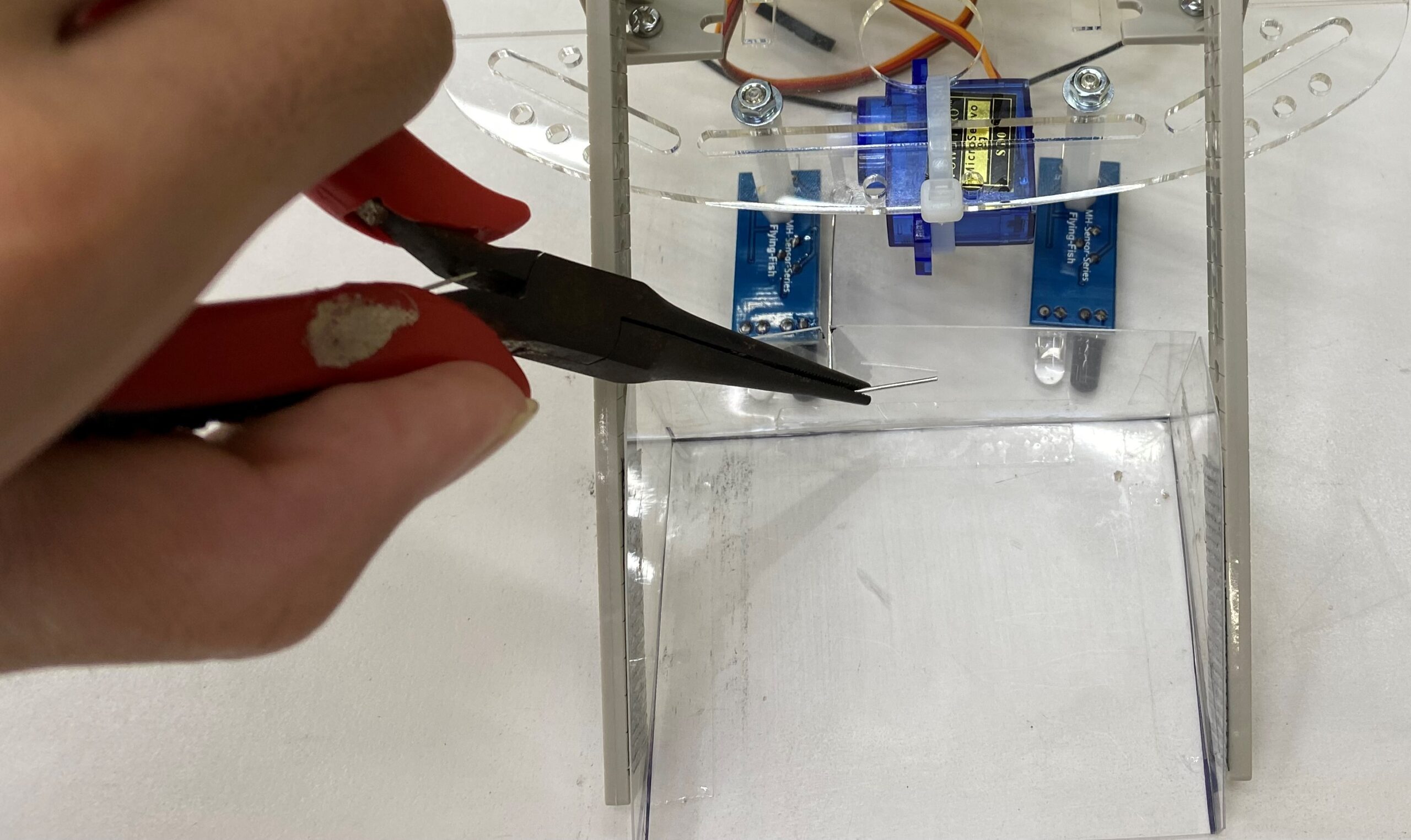
印の位置を上から1.5センチ程度切り込みを
入れ、ピンロッドを差し込みます。
右の写真のようにラジオペンチなどを
使って折り曲げます。
ピンロッドとホールドはセロファンテープなど
を使って固定しましょう。
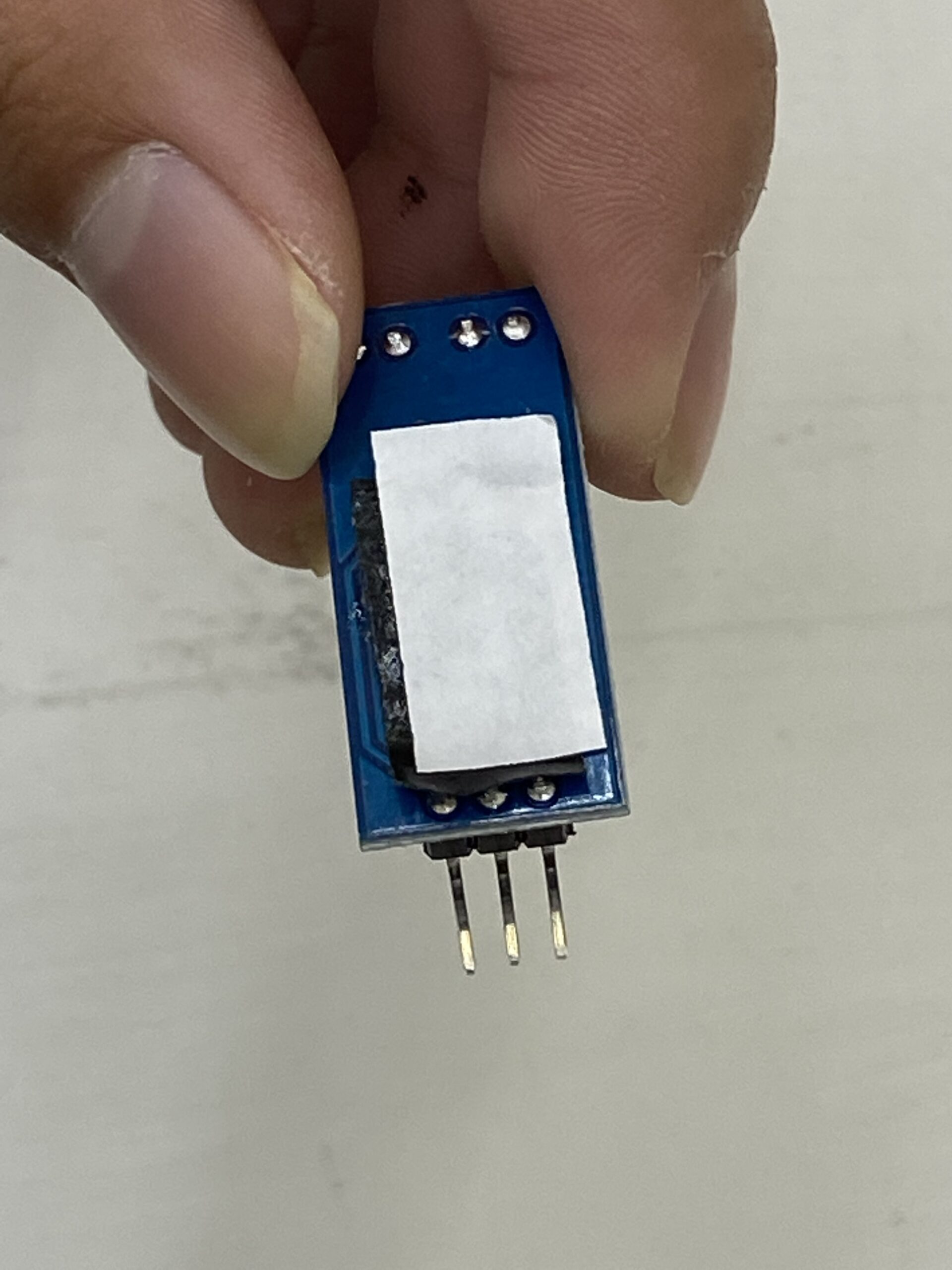
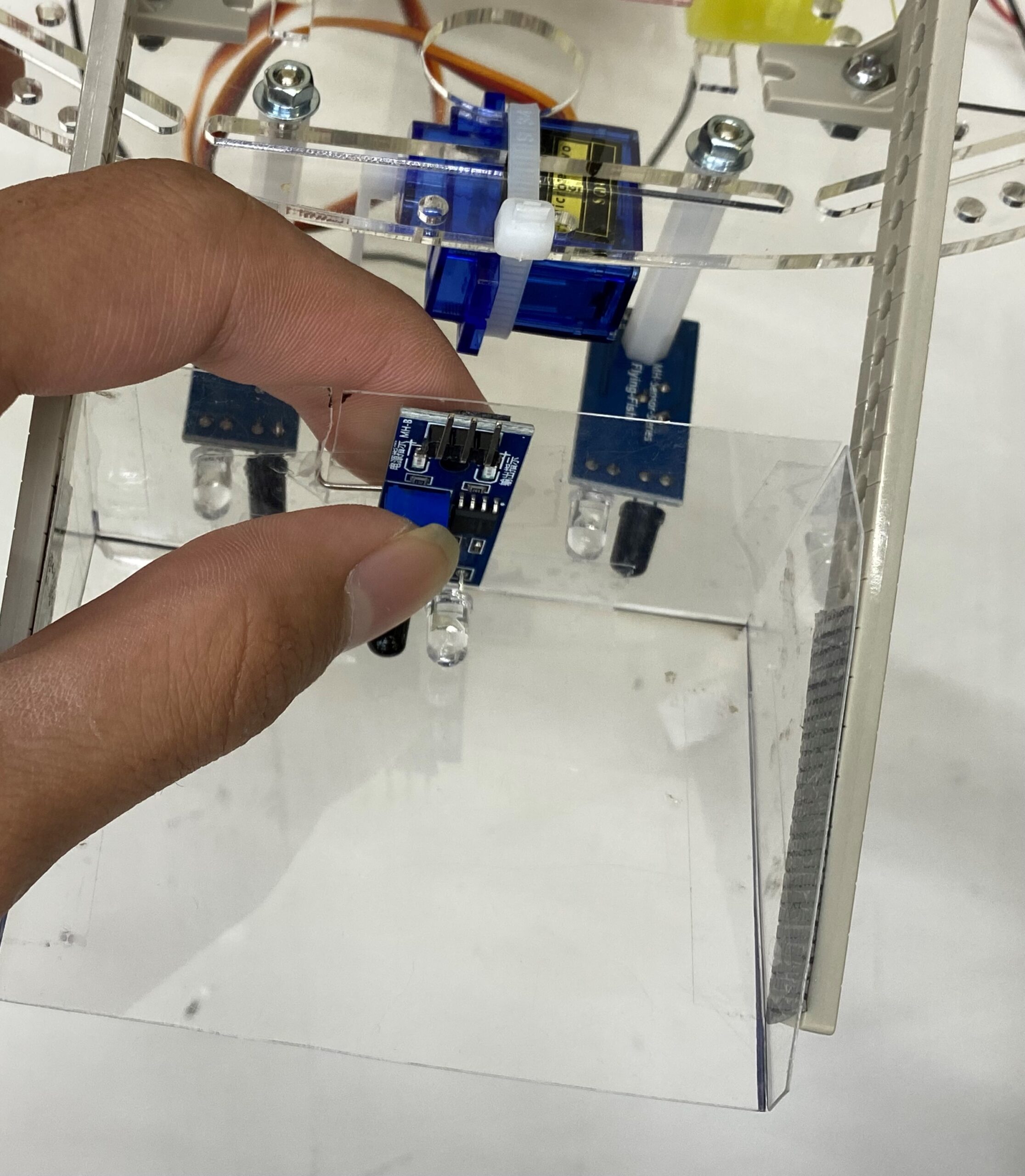
10. センサーの背面に両面テープを貼り、
ホールドの背面の中央に貼り付けます。
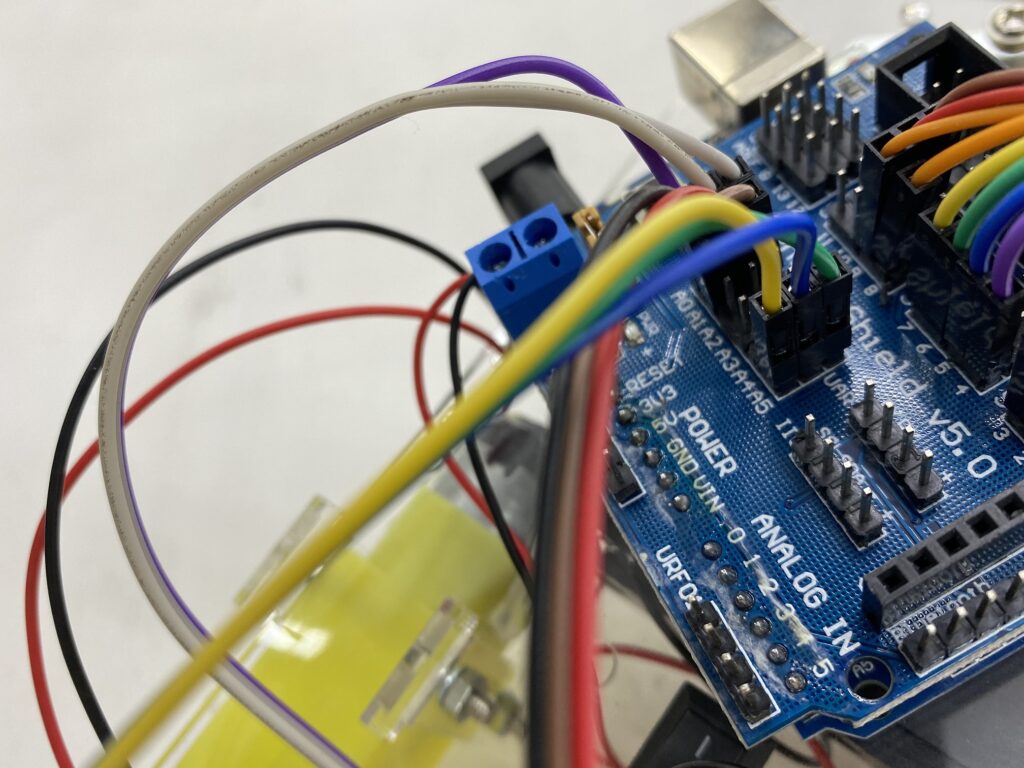
電源の配線
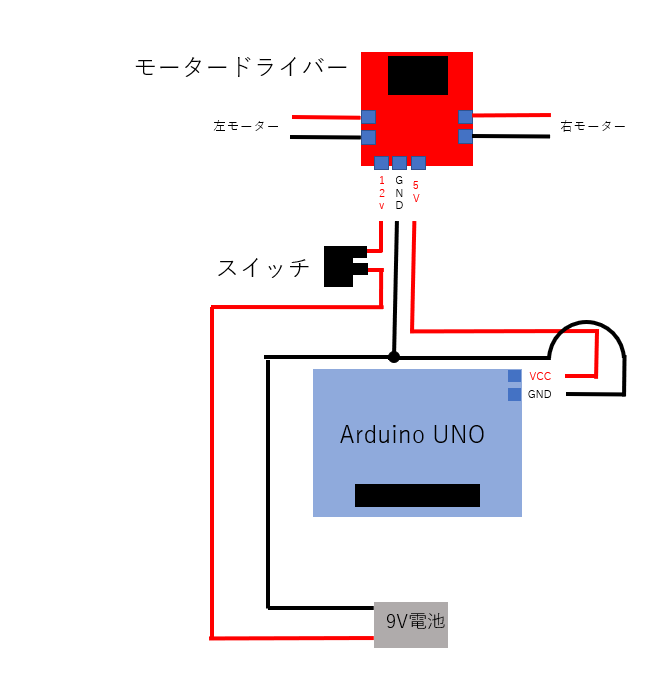
1. スナップケーブルを右の写真のように後ろ
から見て左が赤、中央が黒のケーブルと
なるようにつなげます。
2. 電池ボックスから出ている黒のケーブルと
スイッチから出ている赤のケーブルを
センサーシールドの端子台に左が黒、
右が赤となるようにつなげます。
3. 左右のモーターをモータードライバーの
左右の端子台に前側が赤いケーブルと
なるようにつなげます。
モータードライバーとセンサーシールドの配線
1. 6本くっついているケーブルをつかって
シールドとモータードライバーをつな
ぎます。
※色は関係ありません
接続表
センサーシールド側 モータードライバー側
S 3 ENA
S 4 IN1
S 5 IN2
S 6 ENB
S 7 IN4
S 8 IN3
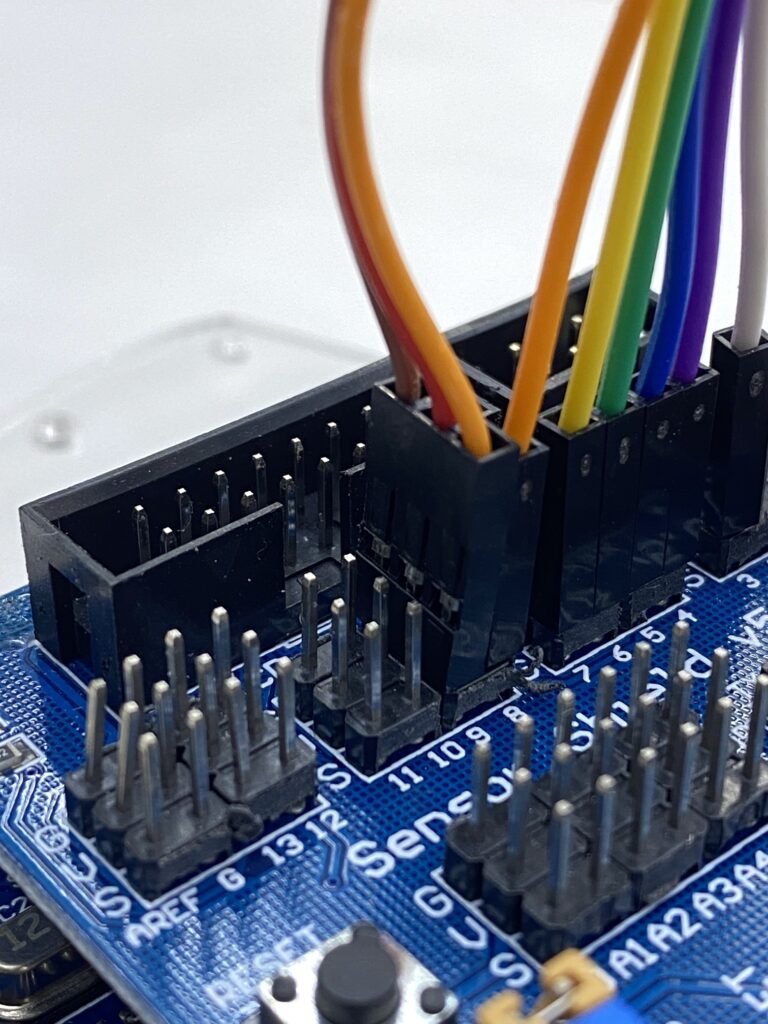
2. サーボモーターから出ているケーブルを
写真の位置に接続します。
接続表
センサーシールド側 サーボモーター側
S 9 オレンジ線
V 9 赤線
G 9 茶色線
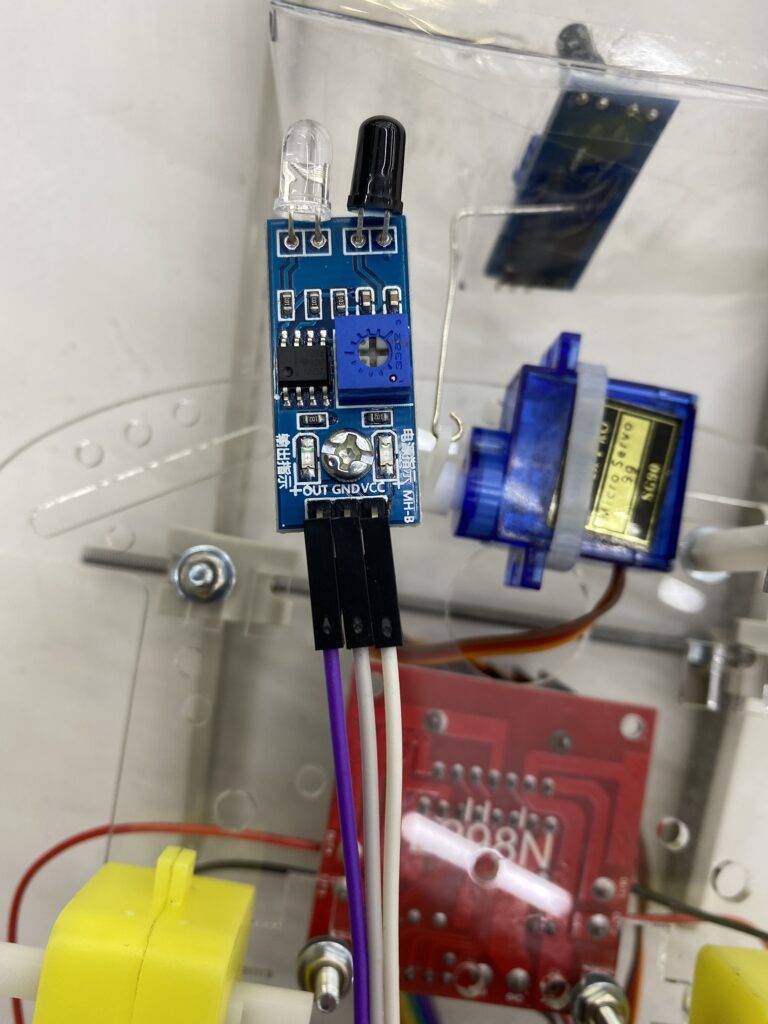
3. 3本くっついているケーブルを使って
上から見て右側のセンサーと
センサーシールドをつなげます。
※色は関係ありません
接続表
センサーシールド側 右センサー側
S A0 OUT
V A0 VCC
G A0 GND
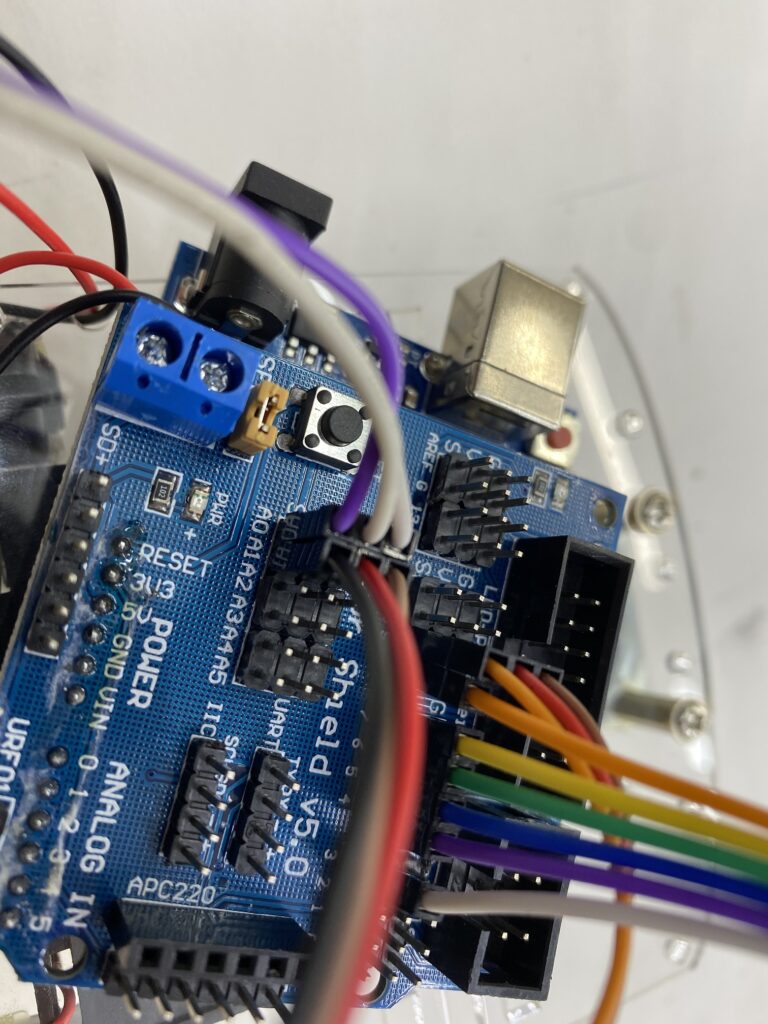
4. 先ほどと同様に3本くっついているケーブルを
使って上から見て左側のセンサーと
センサーシールドをつなげます。
※色は関係ありません
接続表
センサーシールド側 左センサー側
S A1 OUT
V A1 VCC
G A1 GND
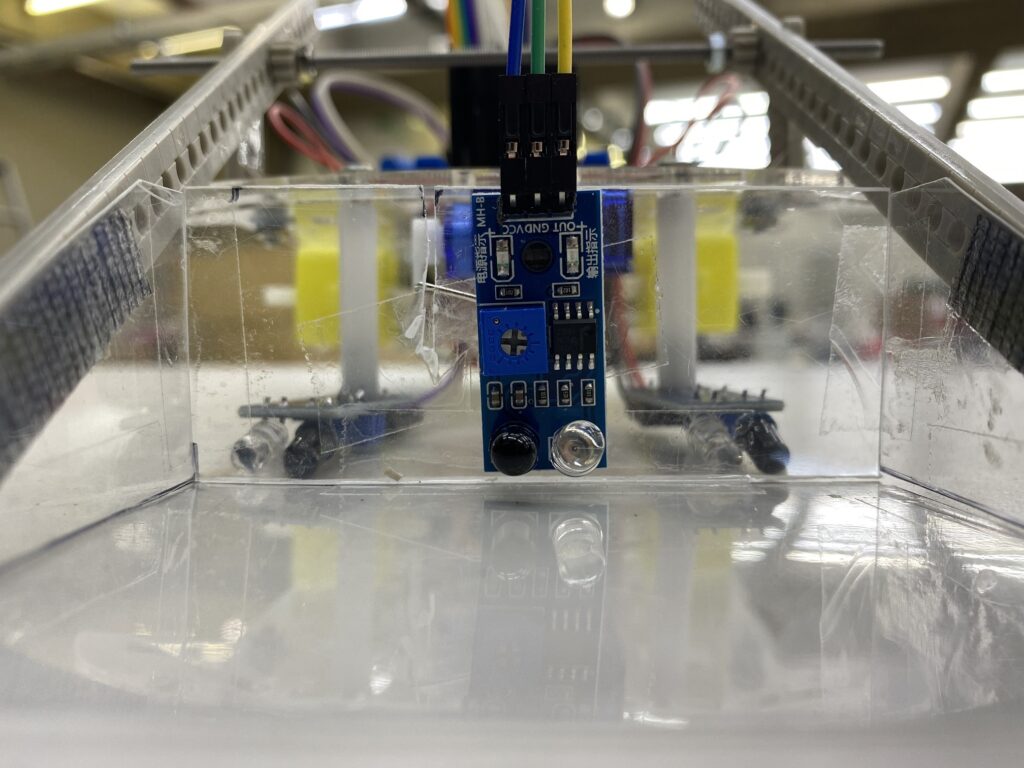
5. ホールドについているセンサーと
センサーシールドを3本くっついている
ケーブルを使ってつなげます。
※色は関係ありません
接続表
センサーシールド側 左センサー側
S A5 OUT
V A5 VCC
G A5 GND

6. すべてのセンサーのLEDの部分をビニール
テープで巻きます。
センサーの感度を上げるためです。
タイヤの取り付け
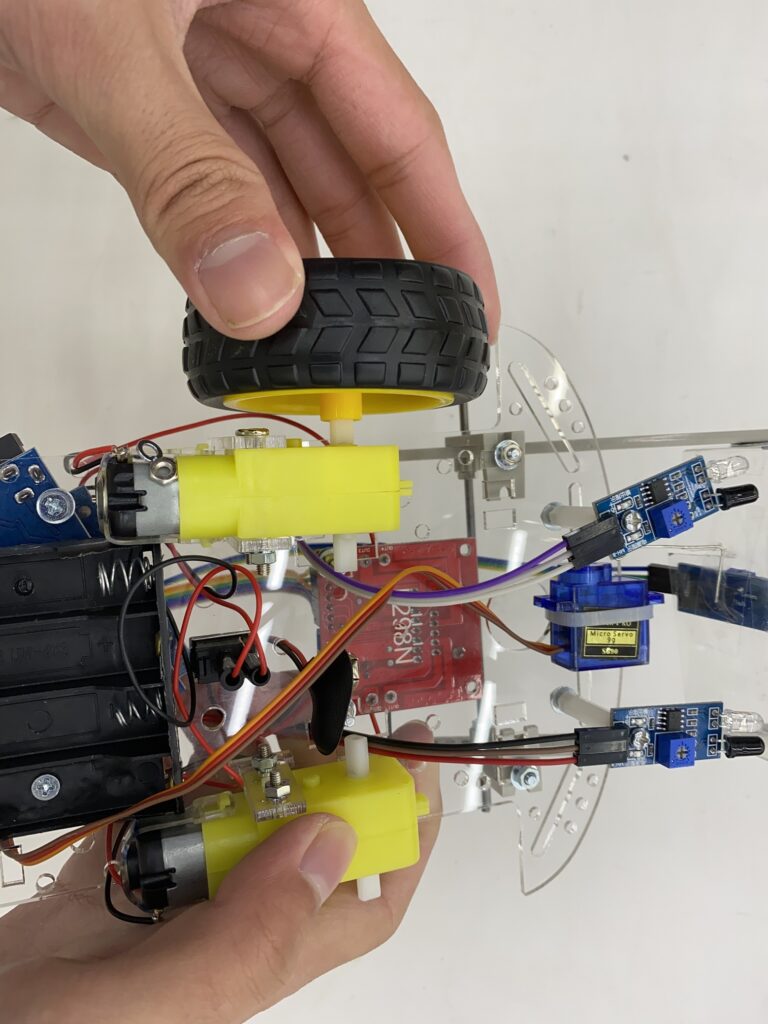
タイヤをモーターに取り付けます
!完成!
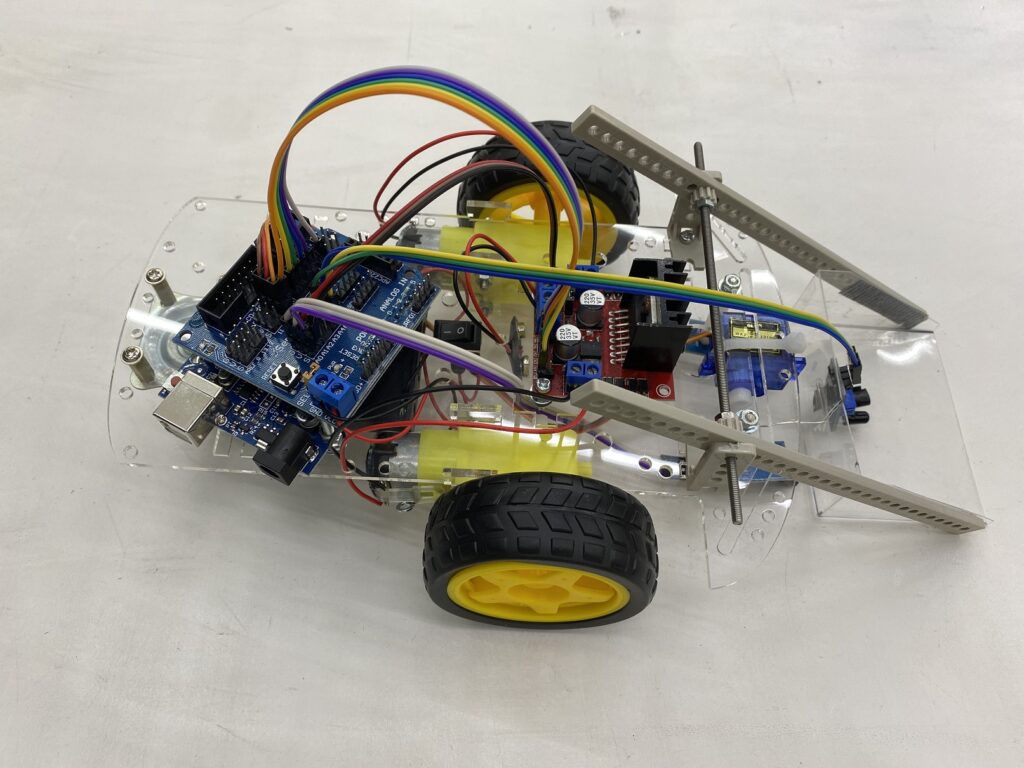

おつかれさまでした!次はプログラムを作ってロボットを動かしましょう!